
nav_Msgs::GetPlan and make_plan service is not returning path
Hello,
I have the move_base node running in my navigation stack. I call the GetPlan service separately to calculate the path (not Euclidean distance) between the robot start and a given goal points. However, instead of returning a path in the map, the service client returns a straight Euclidean distance across the obstacles in the map. What wrong am I doing?

What does your costmaps look like? Looks like there is only a static map layer.
When I run rostopic echo for both the globalcostmap and the localcostmap, it shows proper values with 0s and some nos.. What else should I check?
You should be able to visualize them in rviz (by clicking this ). Do they look realistic in your case?
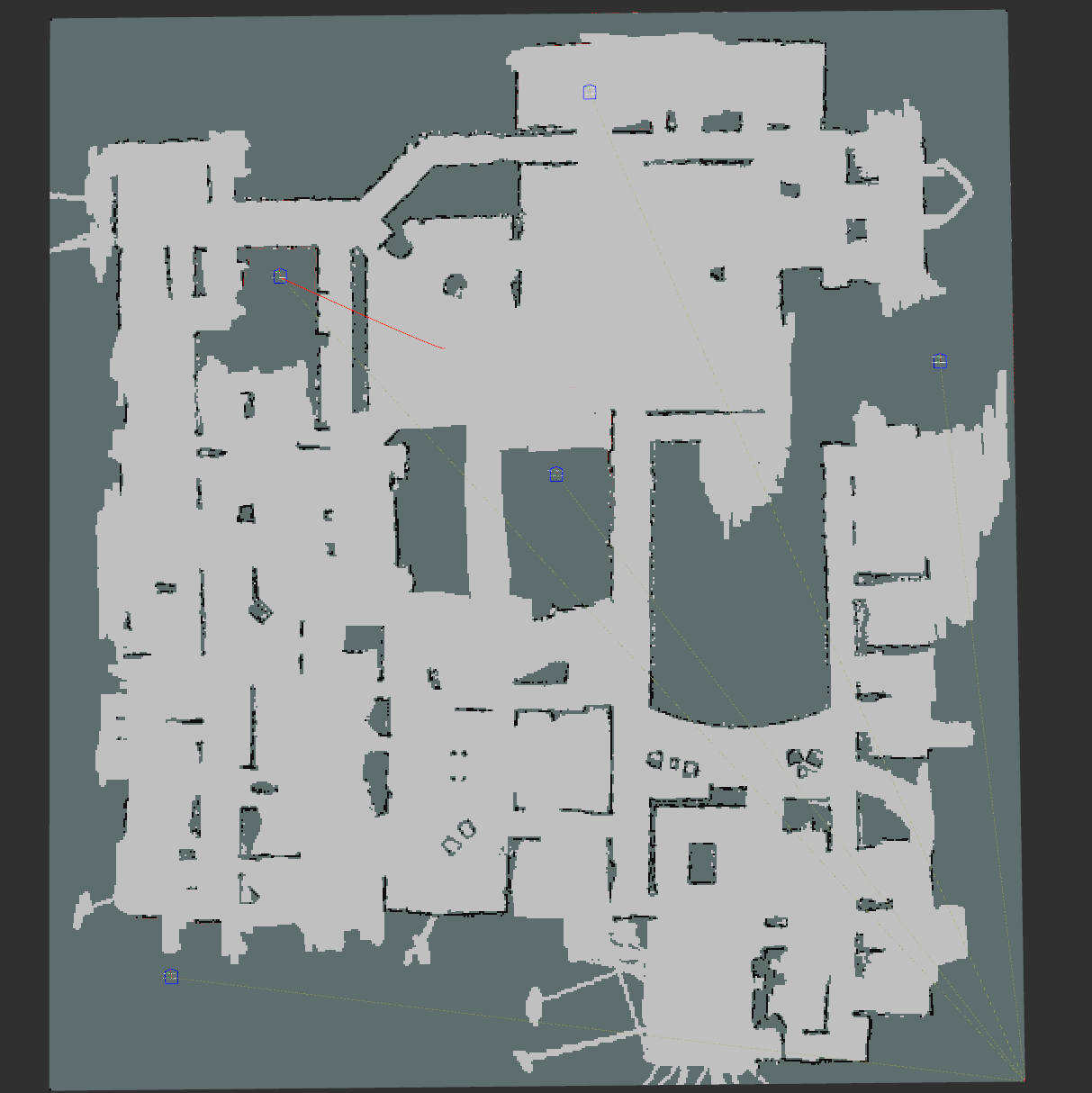
Check this screenshot. It looks fine but the path is generated across the obstacles