
how to identity the grid center with saved map center?


I created the map using a gmapping, then save it, but I saw the center of the map doesn't identify with the center of the grid when I run it this command "roslaunch e100_navigation slam_gmapping.launch".
another issue: the coordinates of the map and Odom located outside the map, I found it on the region of the grid. 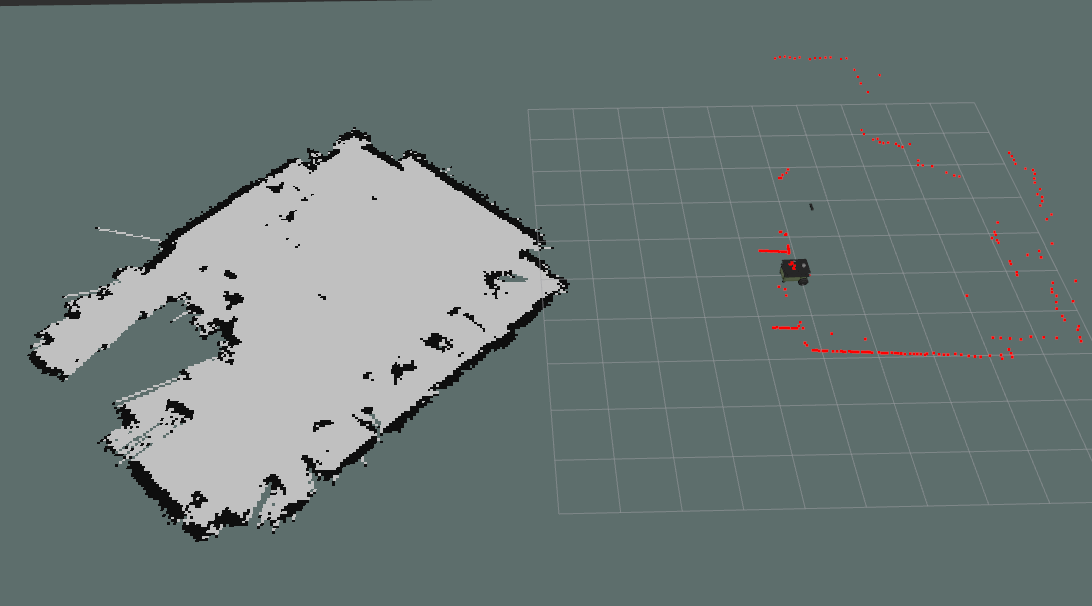
you see the localisation of the robot outside the map
I'd like to see it on the map
what is wrong?
Any help would be appreciated
add a comment

