
The color of gazebo_ros_openni_kinect's pointcloud2 is different with the image
Hello,
I have a Kinect gazebo model.
kinect_gazeob.xml
<?xml version="1.0" ?>
<!-- =================================================================================== -->
<!-- | This document was autogenerated by xacro from kinect_gazebo.xacro | -->
<!-- | EDITING THIS FILE BY HAND IS NOT RECOMMENDED | -->
<!-- =================================================================================== -->
<robot name="kinect_camera" xmlns:xacro="http://ros.org/wiki/xacro">
<!-- Create kinect reference frame -->
<!-- Add mesh for kinect -->
<link name="kinect_link">
<!-- <origin xyz="0 0 0" rpy="0 0 0"/>-->
<inertial>
<origin rpy="0.0 -0.0 0.0" xyz="0 0 0 "/>
<mass value="0.1"/>
<inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1"/>
</inertial>
<visual>
<origin rpy="0 0 1.5707963" xyz="0 0 0"/>
<geometry>
<mesh filename="package://object_description/meshes/kinect/kinect.dae"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.07 0.3 0.09"/>
</geometry>
</collision>
</link>
<joint name="kinect_optical_joint" type="fixed">
<origin rpy="-1.5708 0 -1.5708" xyz="0 0 0"/>
<parent link="kinect_link"/>
<child link="kinect_frame_optical"/>
</joint>
<link name="kinect_frame_optical"/>
<gazebo >
<static>true</static>
</gazebo>
<gazebo reference="kinect_link">
<sensor name="kinect" type="depth">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>1.04719753333</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin filename="libgazebo_ros_openni_kinect.so" name="kinect_kinect_controller">
<cameraName>kinect</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>kinect_frame_optical</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</robot>
I load kinect in gazebo by
rosrun gazebo_ros spawn_model -file `rospack find object_description`/urdf/sensor/kinect_gazebo.xml -urdf -x 0 -y -1 -z 0.8 -R 0 -P 0.5 -Y 1.57 -model kinect
The result I see in rviz is as the image below shows:
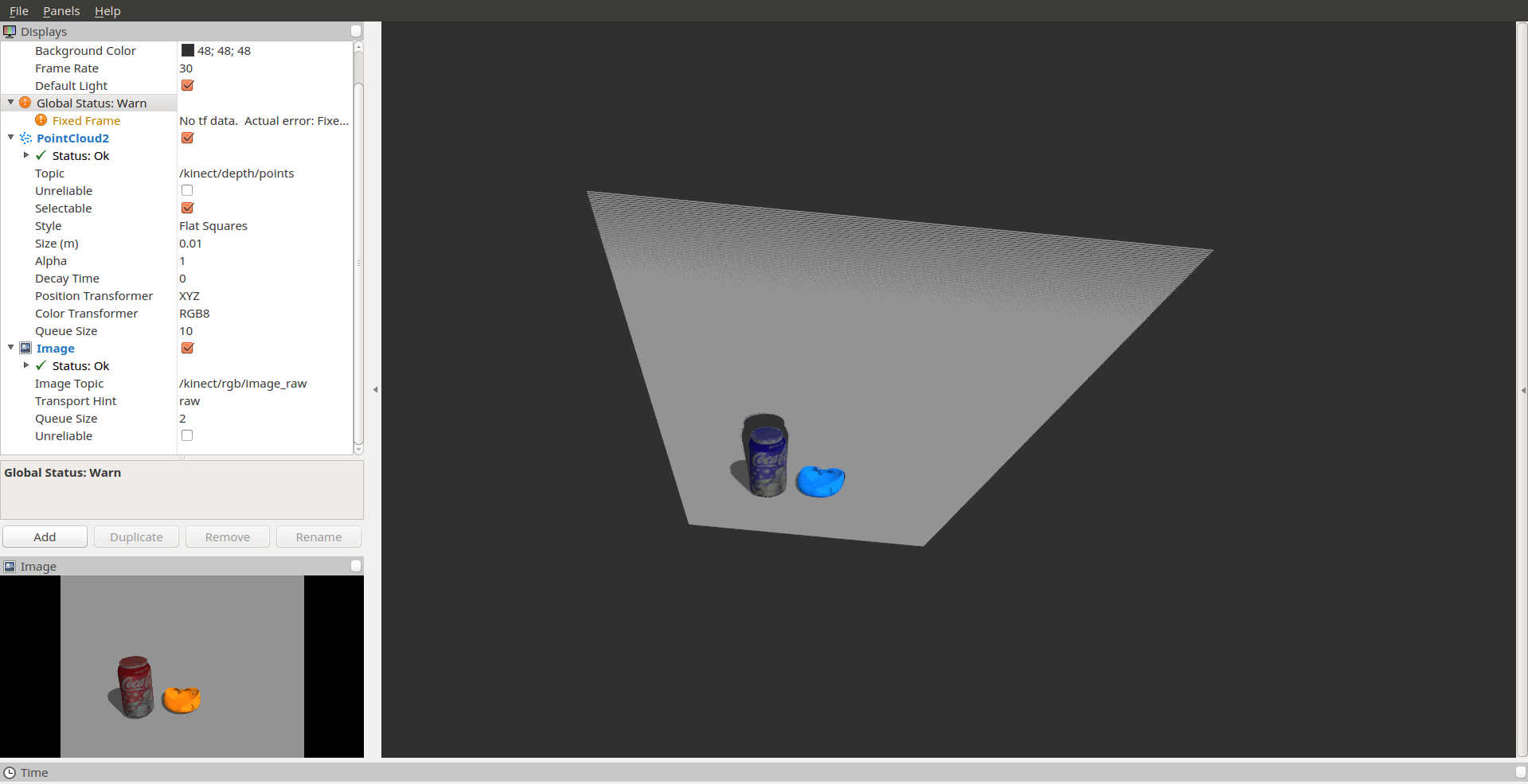
As you can see, the color of PointCloud2 is different with the image. Coud you please give me some advice? Thanks a lot.
add a comment
