
Tracking Robot position using Marker
Hi All,
I am using ROS Kinetic on Ubuntu 16.04. I am working on a RVIZ Marker program to track "\AMCL_Pose" parameter and visualize in RVIZ. The code I have written is as follows
"""
The following program is used to display the real pose positions taken by the
robot in rviz.
References:
1.https://www.programcreek.com/python/example/88812/visualization_msgs.msg.Marker
"""
import rospy
from visualization_msgs.msg import Marker
from geometry_msgs.msg import PoseWithCovarianceStamped,Point
def callback(data):
add_point = Point()
add_point.x = data.pose.pose.position.x
add_point.y = data.pose.pose.position.y
add_point.z = 0
rospy.loginfo('Publishing Marker Point')
marker.points.append(add_point)
# Publish the Marker
pub_point.publish(marker)
rospy.sleep(5)
marker = Marker()
marker.header.frame_id = "/map"
marker.type = marker.LINE_STRIP
marker.action = marker.ADD
# marker scale
marker.scale.x = 0.03
marker.scale.y = 0.03
marker.scale.z = 0.03
# marker color
marker.color.a = 1.0
marker.color.r = 1.0
marker.color.g = 0.0
marker.color.b = 0.0
# marker orientaiton
marker.pose.orientation.x = 0.0
marker.pose.orientation.y = 0.0
marker.pose.orientation.z = 0.0
marker.pose.orientation.w = 1.0
"""
# marker position
marker.pose.position.x = 0.0
marker.pose.position.y = 0.0
marker.pose.position.z = 0.0
"""
# marker line points
marker.points = []
rospy.loginfo('Marker created')
rospy.init_node('position_tracker')
pub_point = rospy.Publisher('realpoints_marker', Marker, queue_size=1)
print "Publisher created...."
rospy.Subscriber("/amcl_pose",PoseWithCovarianceStamped, callback)
print "Subcriber created...."
rospy.spin()
I get the following result
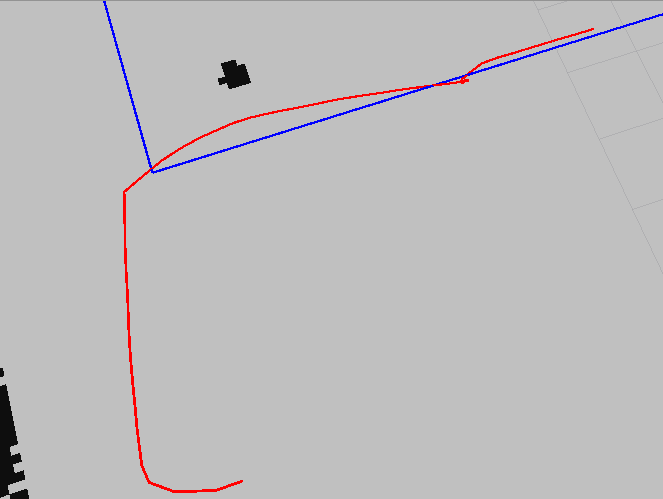
The issue is that the length and orientation of the line are not proper. The robot has moved over 20 meters but in rviz it showing only 5 meters.
How to resolve this issue ?
add a comment

