
Calculating inertia for a vehicle robot
I'm trying to set the inertia for this Ackermann vehicle robot. I'm trying to model the GEM e2 https://gem.polaris.com/en-us/e2/specs/
I'm using these equations: https://en.wikipedia.org/wiki/List_of...
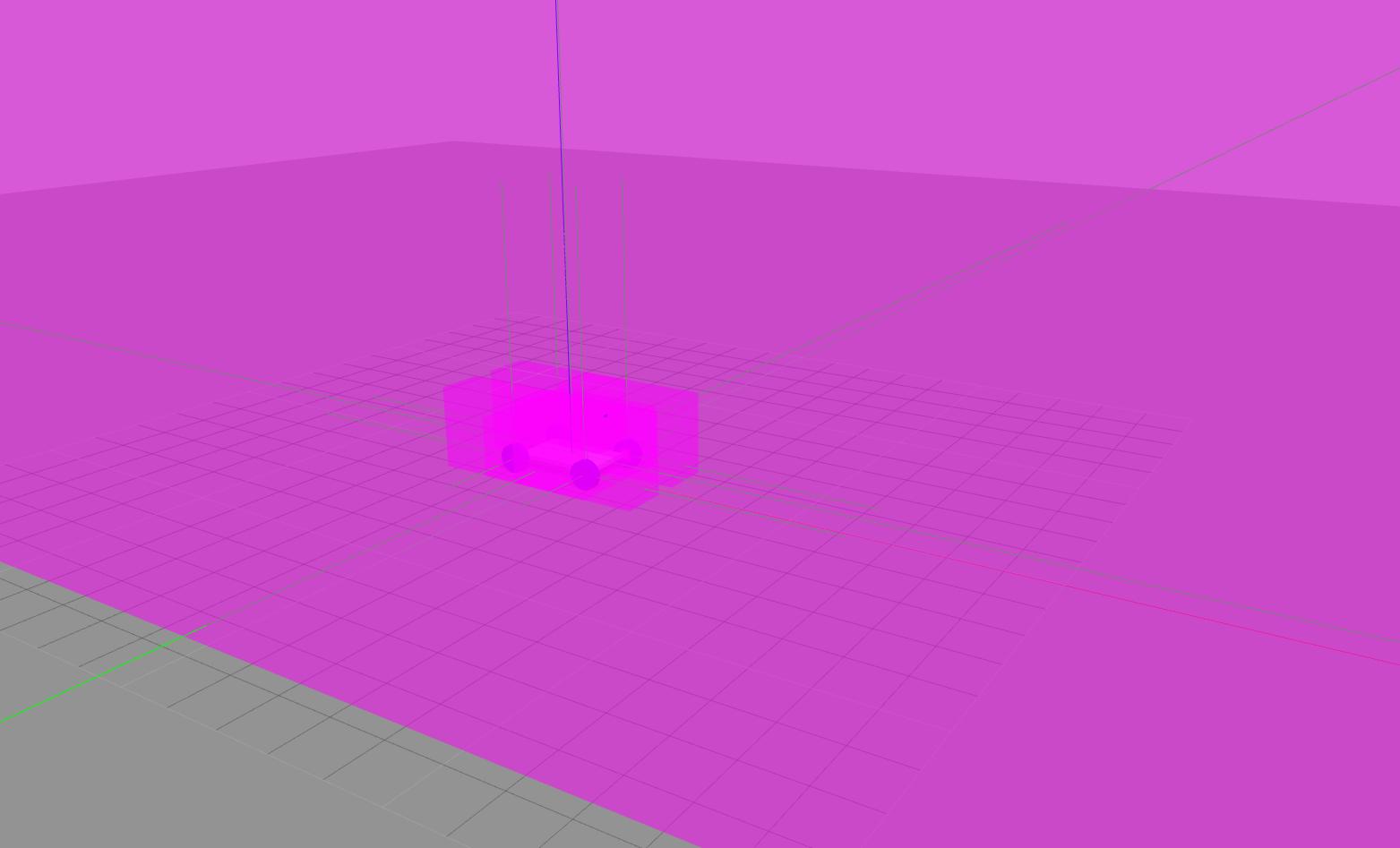
It seems pretty straight forward. I'm using meters and kilograms. However, in Gazebo when I use the View Inertia option -- to see the pink rectangles representing the inertia -- it's way bigger than the robot.
Am I missing something important???
Here is how I'm calculating inertia. I've tried it a few different ways:
<!--<macro name="box_inertia" params="m x y z">
<inertia ixx="${m*(z*z+x*x)/12}" ixy = "0" ixz = "0"
iyy="${m*(y*y+x*x)/12}" iyz = "0"
izz="${m*(y*y+z*z)/12}" />
</macro>
<macro name="box_inertia" params="x y z mass">
<inertia ixx="${0.0833333 * mass * (y*y + z*z)}" ixy="0.0" ixz="0.0"
iyy="${0.0833333 * mass * (x*x + z*z)}" iyz="0.0"
izz="${0.0833333 * mass * (x*x + y*y)}" />
</macro>-->
<macro name="box_inertia" params="x y z m">
<inertia ixx="${m*(y*y+z*z)/12}" ixy = "0" ixz = "0"
iyy="${m*(x*x+z*z)/12}" iyz = "0"
izz="${m*(x*x+z*z)/12}" />
</macro>
<macro name="cylinder_inirtia" params="m r h">
<inertia ixx="${(m*((3*r*r)+(h*h)))/12}" ixy = "0" ixz = "0"
iyy="${(m*((3*r*r)+(h*h)))/12}" iyz = "0"
izz="${(m*r*r)/2}" />
</macro>
add a comment
