
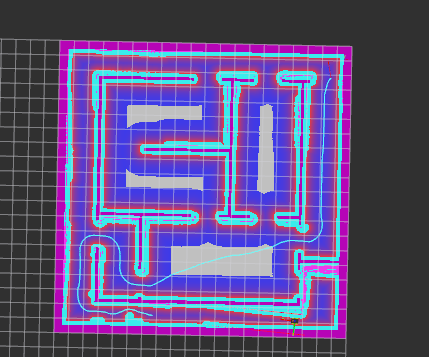
Why does NavFn return a path that doesn't start from the robot location?
The path is the cyan line, and the robot is in the lower right corner. As you can see, the path doesn't start from where the robot is, resulting in move_base aborting the goal. The map isn't that big (1000x1000 px at 0.02 m/px) or complicated. Is there a limit to the path length that navfn returns?
The move_base package version is 1.14.4, on kinetic. I'm using the navigation stack configuration that comes with the jackal_navigation package (0.6.3): https://github.com/jackal/jackal/tree...
Platform: Ubuntu 16.0 (64-bit)
I modified a few parameters in the AMCL launch file for localization, but I don't think that is relevant here. Here are my common (both global and local) costmap parameters:
map_type: costmap
origin_z: 0.0
z_resolution: 1
z_voxels: 2
obstacle_range: 6.0
raytrace_range: 8.5
always_send_full_costmap: True
publish_voxel_map: false
transform_tolerance: 0.5
meter_scoring: true
footprint: [[-0.21, -0.165], [-0.21, 0.165], [0.21, 0.165], [0.21, -0.165]]
footprint_padding: 0.1
plugins:
- {name: obstacles_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflater_layer, type: "costmap_2d::InflationLayer"}
obstacles_layer:
observation_sources: scan
scan: {sensor_frame: front_laser, data_type: LaserScan, topic: front/scan, marking: true, clearing: true, min_obstacle_height: -2.0, max_obstacle_height: 2.0, obstacle_range: 6.0, raytrace_range: 8.5}
inflater_layer:
inflation_radius: 1.75
cost_scaling_factor: 2.58


Does this happen every path you attempt? Or just once?
It seems to always happen whenever the path gets too long. If I set a goal close to the robot, there's no problem, but as soon as the shortest path exceeds some threshold it returns the non-valid path. I tested this using the move_base client and setting the goal point via rviz, and the same happens in either case.