
Robot Localization output incorrect for movement in Y axis with Vectornav IMU
Hello,
I am using Robot Localization to localize rover with an Marvelmind Indoor GPS, Vectornav IMU and Wheel Encoder Odometry.
For the vectornav imu I am using code set from: https://github.com/dawonn/vectornav
I have ensured that the vectornav IMU follow ENU standard. However the output orientation is flipped only on the Y axis (With respect to actual movement in real life) but correct when moving along x axis in the global frame.
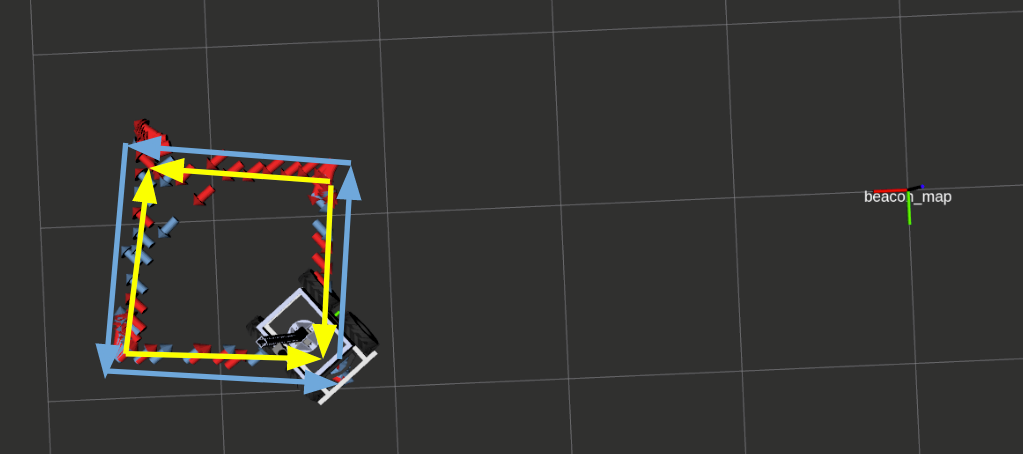
In the test above I moved the rover in a square as representation with the blue arrows. However the ekf output is in yellow and does not match the actual robots orientation only in the Y axis. The robot turns in the correct direction however its just not matching up with the Blue arrows (The real movement of the robot) as its only flipped in one axis.
When I switch the vectornav imu code to the NED format I get this:
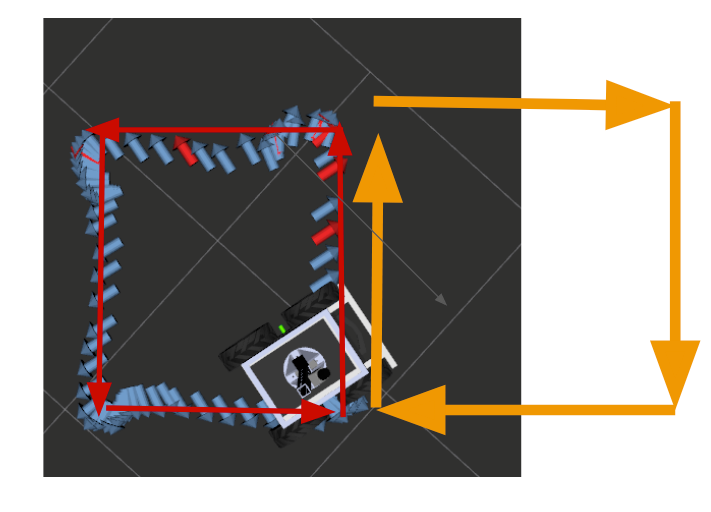
In which the red arrows is the EKF output and the orange is the real robot movement. How all the arrows are moving in the square pattern that I moved the robot however the actual robot had movement that was vertically flipped.
Thoughts? Please let me know if there is more information I can provide for troubleshooting!

