
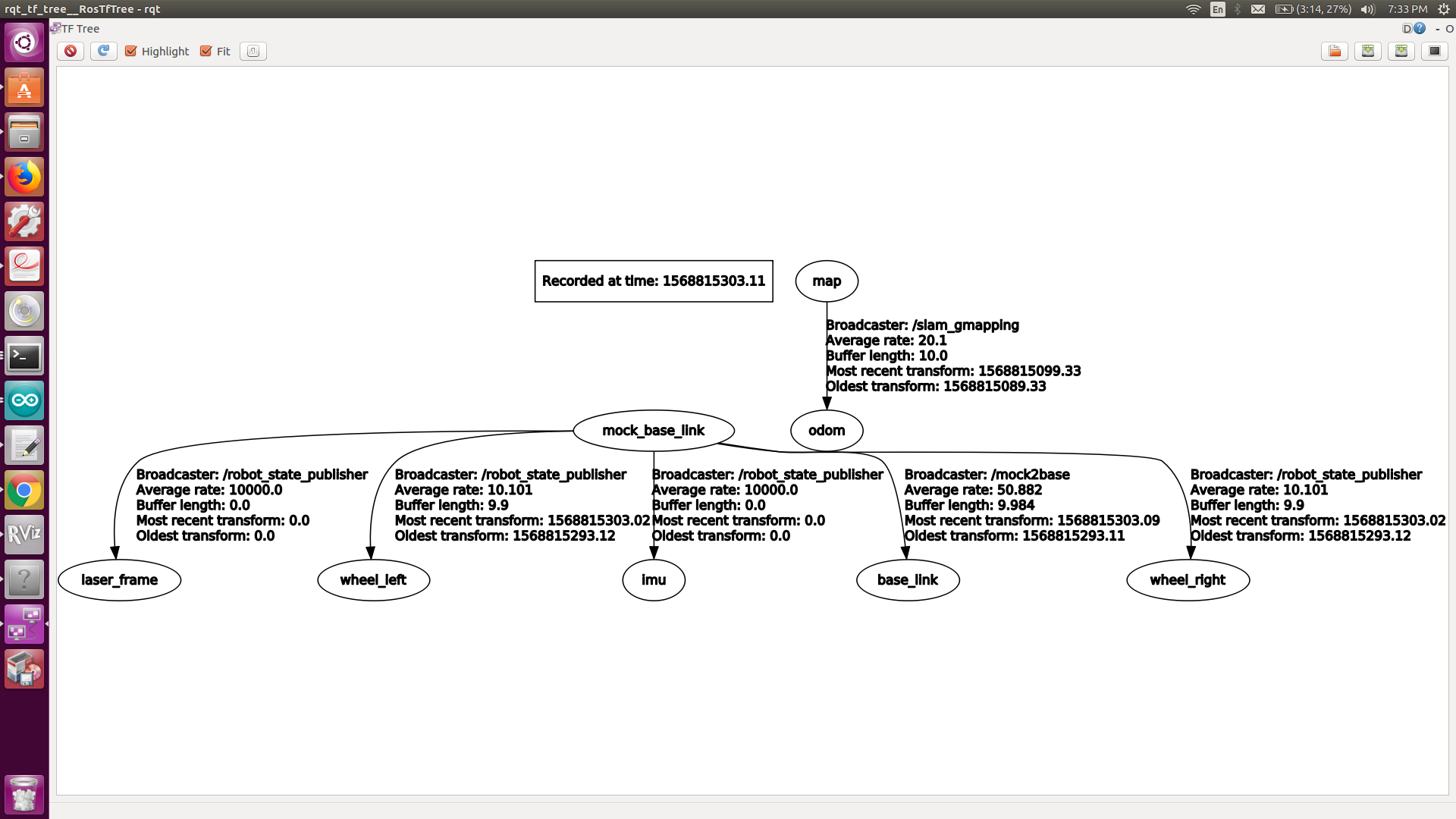
transform from odom,map to base_link

hello , i have changed base_link name to mock_base_link for changing axes of robot model in urdf now i have to do gmapping but i have issue transform is not happening to other links 'odom No transform from [odom] to frame [base_link] similar to map also
i have used
<node pkg="tf" type="static_transform_publisher" name="mock2base" args="0 0 0 -1.57 0 0 mock_base_link base_link 20" />
in launch file
thanks a ton
add a comment

