
pointcloud_to_laserscan with camera pointed downward
so, I have d435 intel realsense camera and it is mounted at 1.3 meters above the floor:
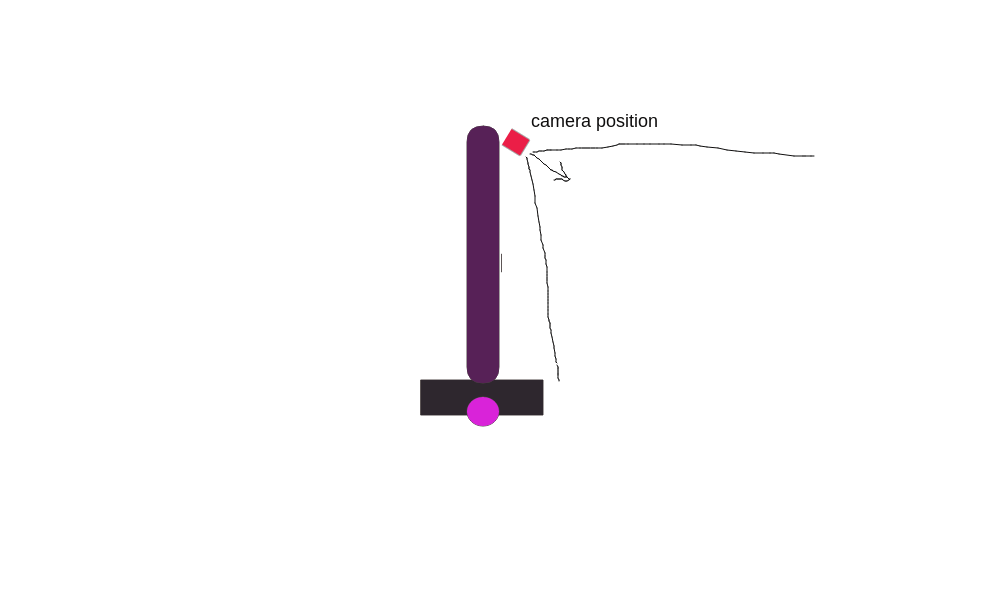
I've tried to use pointcloud_to_laserscan package and I've got laserscan data angled:
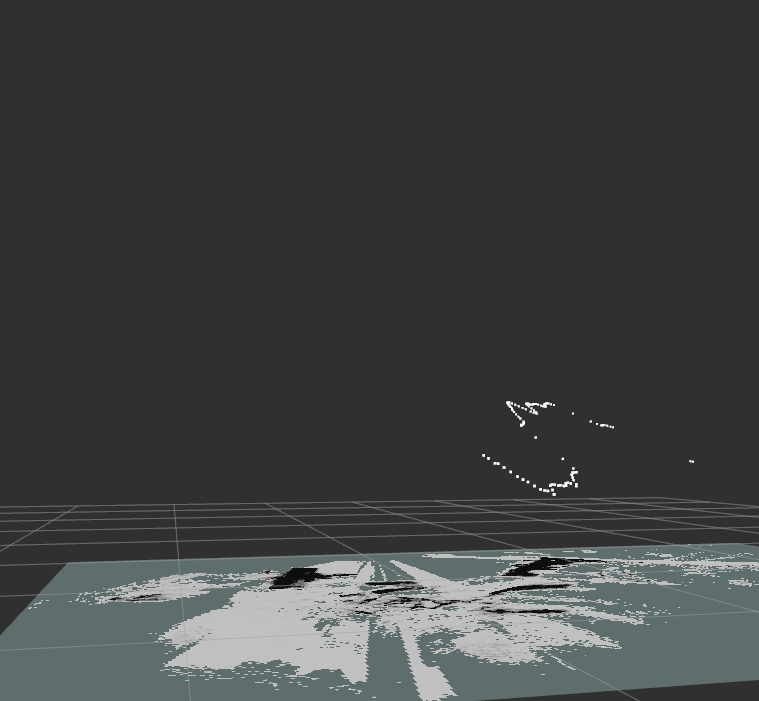
How can I get laserscan data parallel to the floor?


similar question and not answered yet: https://answers.ros.org/question/2688...