
Unable to visualise point cloud from rosbag file in RViz
I have a .bag file which should contain point cloud and RGBD images. However, I'm unable to visualise them in RViz whilst playing the .bag file. This is what I have done:
1) Record using rosbag record camera/depth_registered/image_raw camera/depth_registered/camera_info camera/rgb/image_raw camera/rgb/camera_info --limit=120 -O astra
2) Start roscore
3) rosparam set use_sim_time true
4) rosrun tf static_transform_publisher 0 0 0 0 0 0 map dummy_frame 100
5) rosbag play --clock astra.bag
6) Start rviz
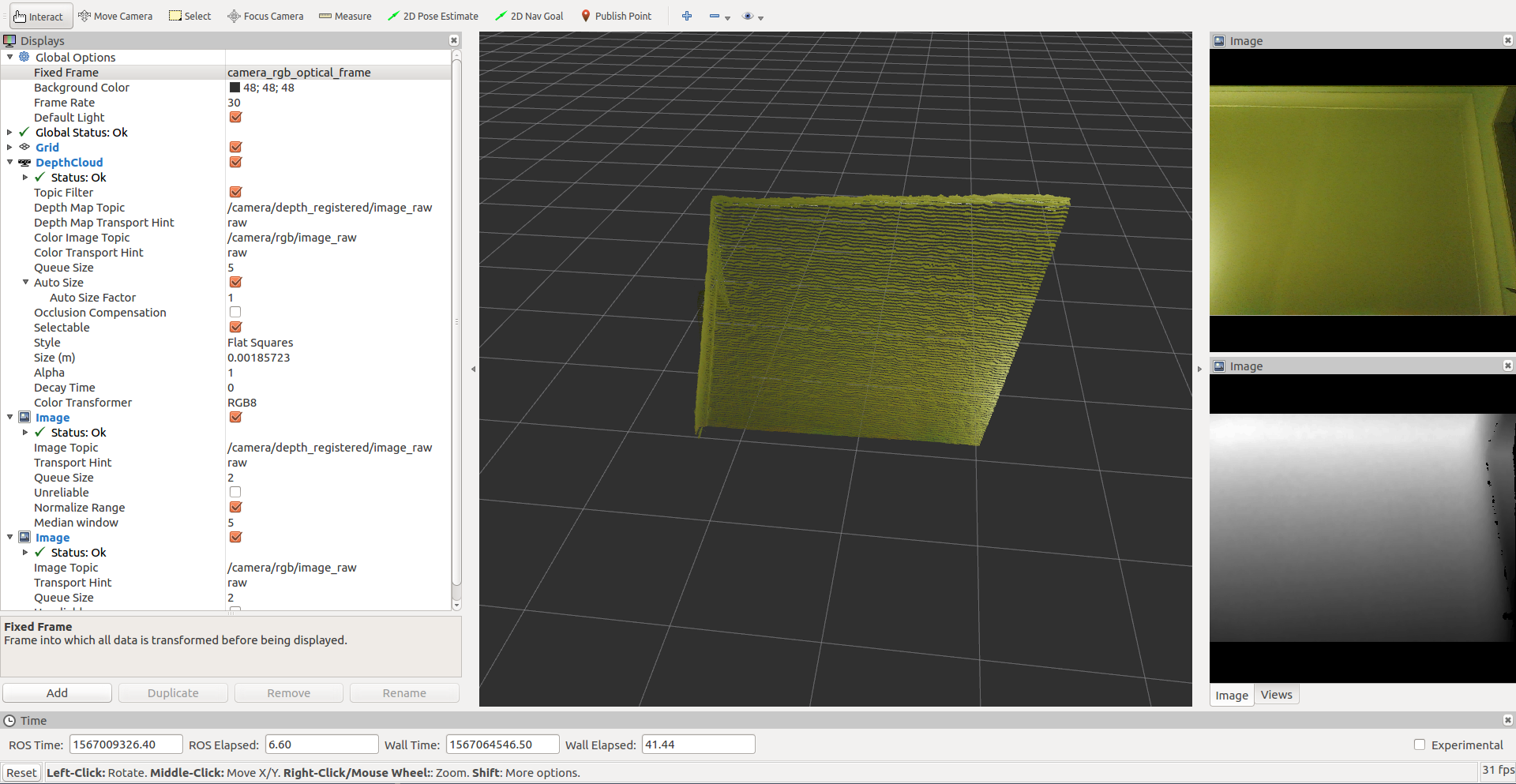
This is the result I get:

Here's my bag file.
Am I missing anything?
add a comment


{kind=link}