
Adding a robot to RVIS, getting error: No transform from [] to []
Kinetic, ROS1
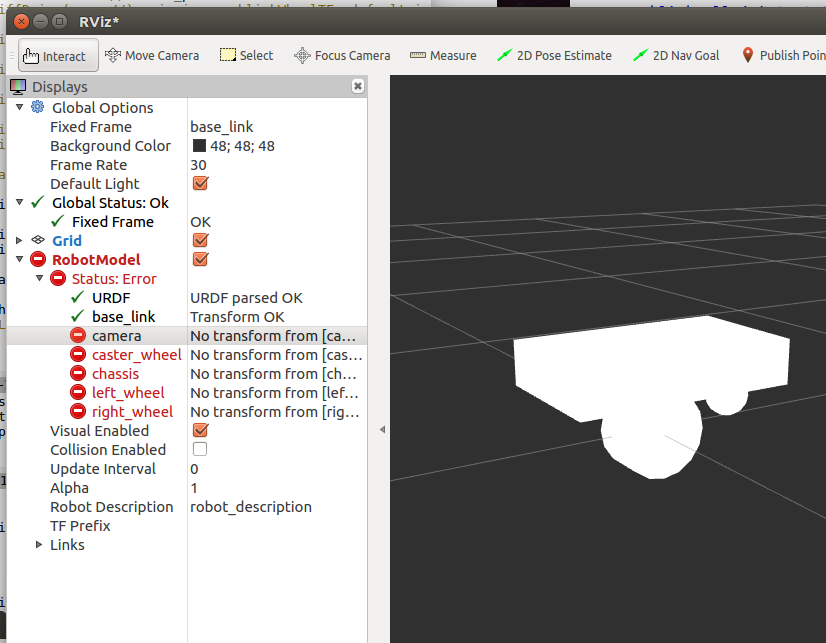
I've been through a variety of tutorials on adding a robot to RVIS. I made a simple differential control robot with a camera working nicely in Gazebo. According to the tutorials, which ROS and Gazebo running, you only need to add the robot model and specify the base link for Fixed Frame. I've done this, but under the robot model only the base_link has a Transform. The right wheel has the error "No transform from [right_wheel] to [base_link], and likewise for the left wheel, chassis, camera, and third wheel.
Also, the robot in RVIS isn't correct.
Is there a step I'm missing? Do I need anything more than the urdf model below? Thanks.
simpleton.xacro
<?xml version="1.0"?>
<robot name="simpleton" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find simpleton_description)/urdf/simpleton.gazebo" />
<xacro:include filename="$(find simpleton_description)/urdf/macros.xacro" />
<xacro:property name="wheelThickness" value="0.1"/>
<xacro:property name="wheelRadius" value="0.1"/>
<xacro:property name="chassisWidth" value="0.3"/>
<xacro:property name="chassisHeight" value="0.1"/>
<xacro:property name="chassisLength" value="0.5"/>
<xacro:property name="casterRadius" value="0.05"/>
<xacro:property name="cameraSize" value="0.05"/>
<!-- Base link -->
<link name="base_link" />
<!-- Chassis -->
<joint name="base_joint" type="fixed">
<parent link="base_link"/>
<child link="chassis"/>
</joint>
<link name="chassis">
<collision>
<origin xyz="0 0 ${wheelRadius+(chassisHeight/2)}" rpy="0 0 0"/>
<geometry>
<box size="${chassisLength} ${chassisWidth} ${chassisHeight}"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 ${wheelRadius+(chassisHeight/2)}" rpy="0 0 0"/>
<geometry>
<box size="${chassisLength} ${chassisWidth} ${chassisHeight}"/>
</geometry>
<material name="white"/>
</visual>
<inertial>
<mass value="1"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
<box_inertia m="0.5" x="${chassisLength}" y="${chassisWidth}" z="${chassisHeight}"/>
</inertial>
</link>
<wheel lr="left" y="-1"/>
<wheel lr="right" y="1"/>
<!-- Caster Wheel -->
<joint name="fixed" type="fixed">
<parent link="chassis"/>
<child link="caster_wheel"/>
</joint>
<link name="caster_wheel">
<collision>
<origin xyz="${casterRadius-chassisLength/2} 0 ${casterRadius-chassisHeight+wheelRadius}" rpy="0 0 0"/>
<geometry>
<sphere radius="${casterRadius}"/>
</geometry>
</collision>
<visual>
<origin xyz="${casterRadius-chassisLength/2} 0 ${casterRadius-chassisHeight+wheelRadius}" rpy="0 0 0"/>
<geometry>
<sphere radius="${casterRadius}"/>
</geometry>
<material name="red"/>
</visual>
<inertial>
<origin xyz="${casterRadius-chassisLength/2} 0 ${casterRadius-chassisHeight+wheelRadius}" rpy="0 0 0"/>
<mass value="0.5"/>
<sphere_inertia m="0.5" r="${casterRadius}"/>
</inertial>
</link>
<!-- Camera -->
<!-- You can adjust the camera angle with the p in rpy, measured in radians. -->
<!-- You can also increate the height of the camera by adding a number, in meters, -->
<!-- to the z in xyz. For example, to simulate a camera mounted on a 1/2 meter post, -->
<!-- we can replace the ...add a comment

