
What is a good way of storing robot paths and access them?
Hi guys
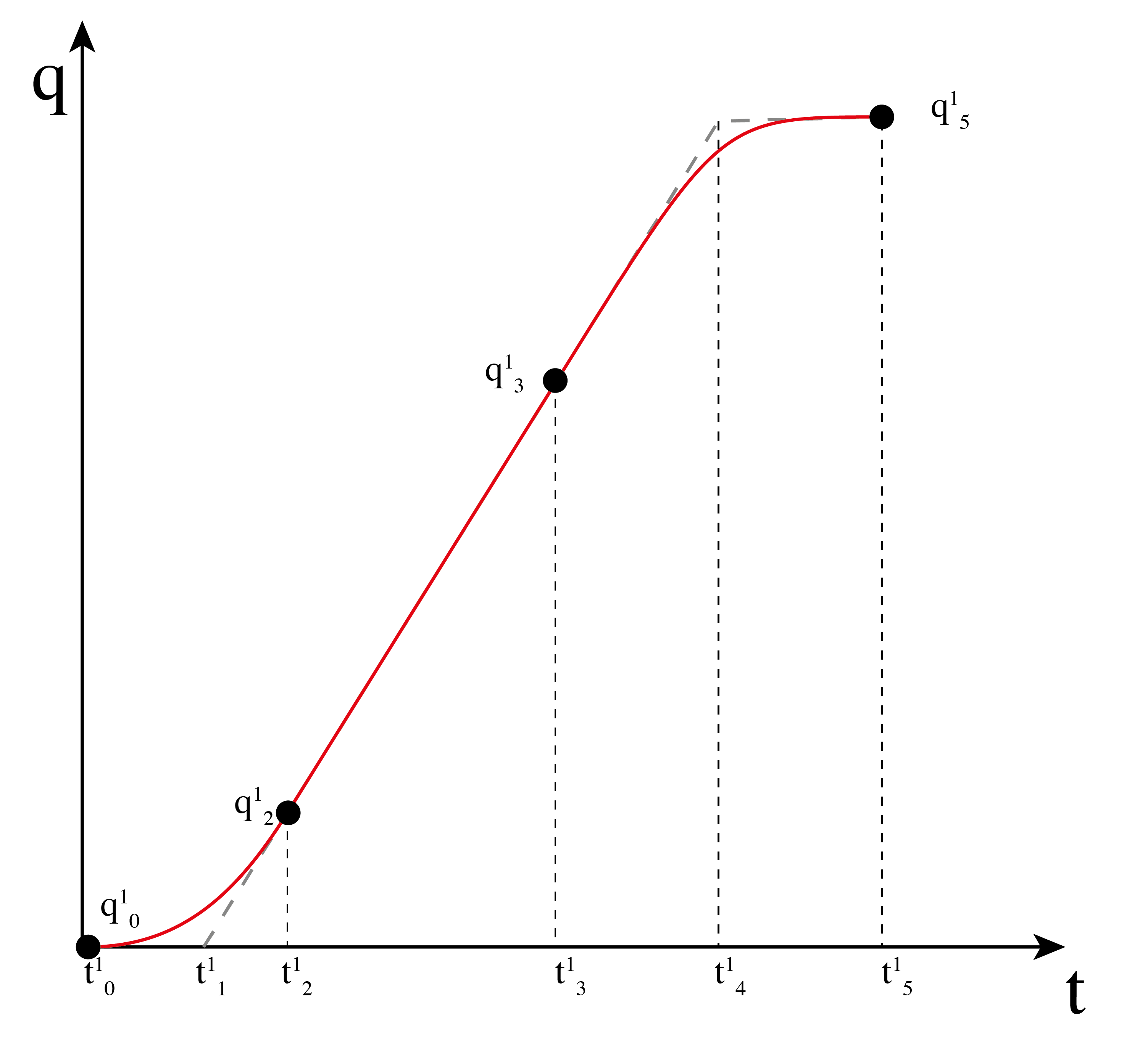
I am writing a controller for a 6DOF robot arm. I am generating paths for the robot to come from the starting point to a desired pose. To do this I do a piecewise polynomial interpolation. Meaning that I first easily interpolate linearly over time between the two points. And then I attach a 6-degree polynomial in the beginning and the end to smoothen the motion. It looks then as follows:
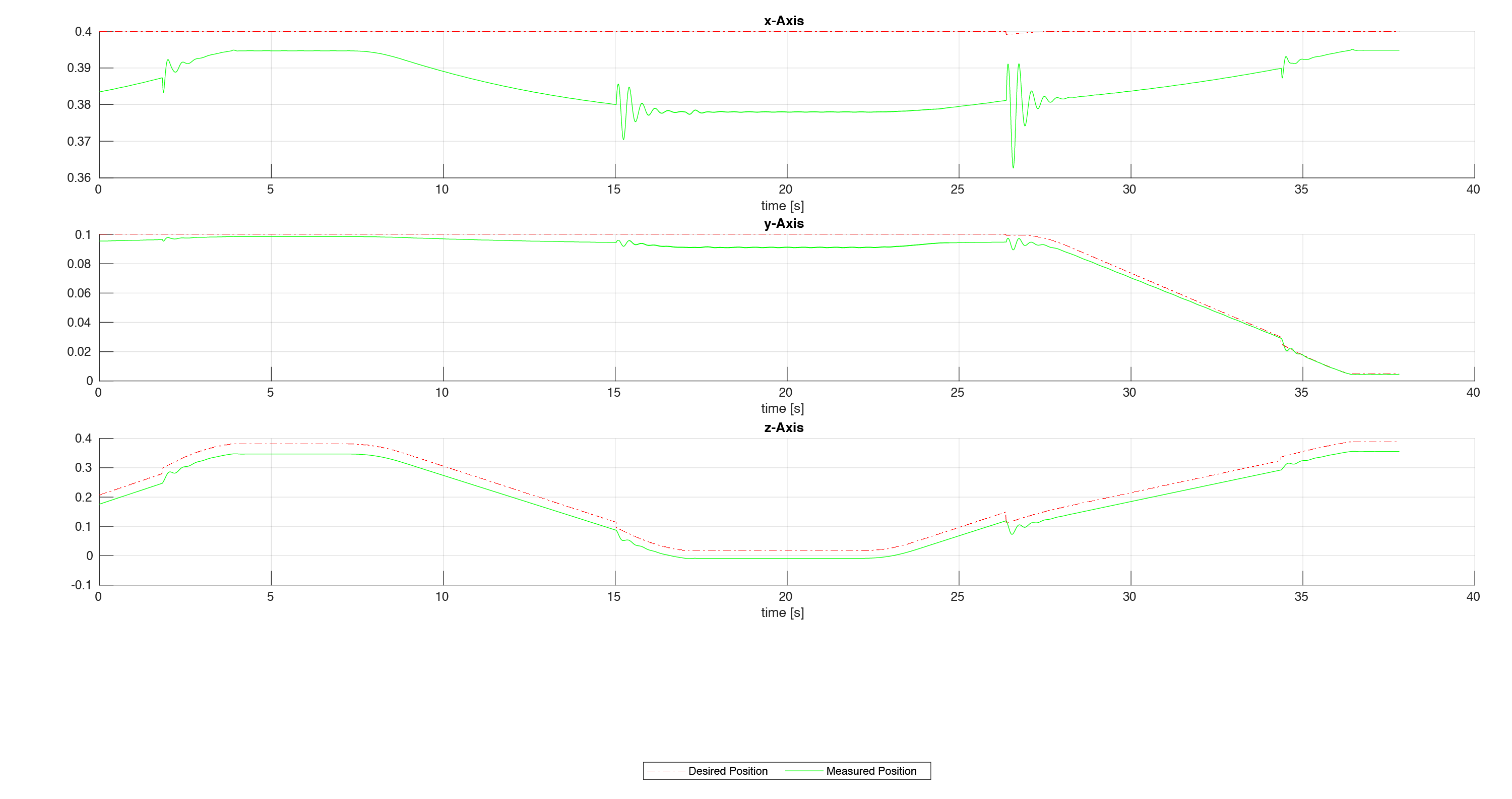
Now I have the problem, that because of numerical issues (at least I think so) or because of time discretization, I got small jumps between the different polynoms:
My idea is now to just filter the paths to get rid of these jumps. For this I need to store the path somehow that I can filter it but I don't really have an idea what is a good way of doing this. How are paths saved for example in MoveIt? Do they save discrete or continuous paths? Is there a way of connecting my polynoms to make it "filterable"?
Thanks for your help!


Could you please attach your image directly to the question? You have 11 karma, so you should be able to do this.
Yes of course. When I posted the question this morning I did not have enough karma yet. Updated my question accordingly.