
help ROBOT_LOCALIZATION

Hello
I'm rephrasing my question ...
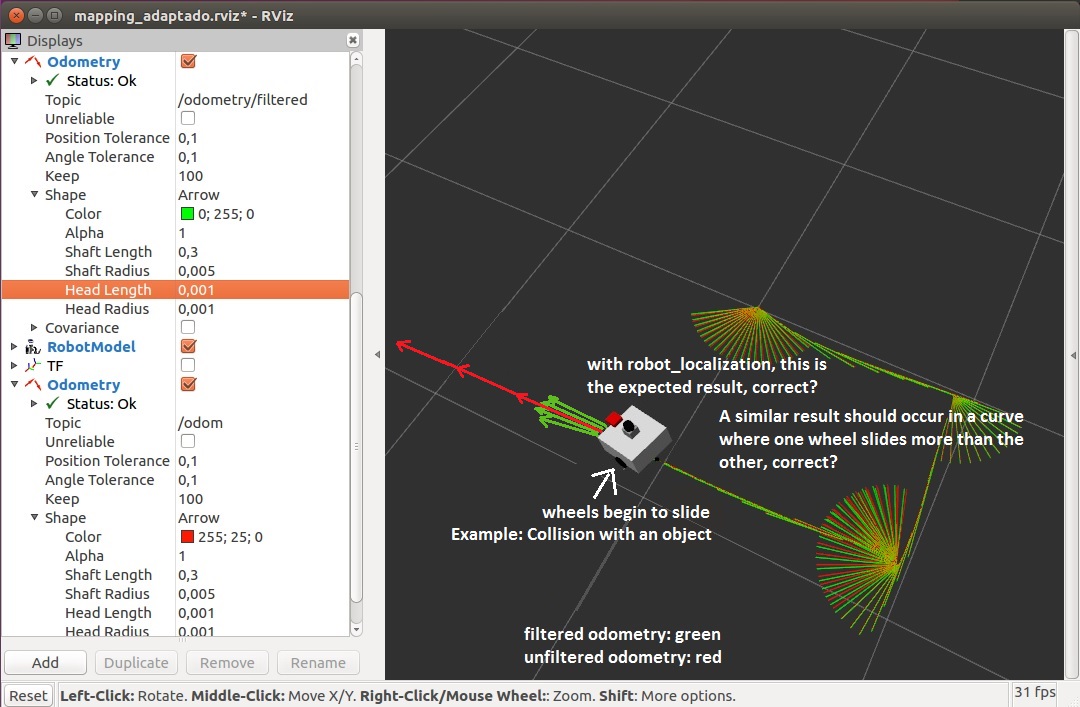
As the following image, would this be the expected result with the Robot_Localization package?
If so, based on my odometry and IMU readings below, what would be the correct configuration of ekf_template.yaml? Or am I mistaken in something?
/odom
---
header:
seq: 735
stamp:
secs: 1559070711
nsecs: 593724715
frame_id: "odom"
child_frame_id: "base_footprint"
pose:
pose:
position:
x: 3.58344948396
y: 0.0485756406341
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0110481512963
w: 0.999938967314
covariance: [0.001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.001]
twist:
twist:
linear:
x: 0.145770311356
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.00531763536856
covariance: [0.0001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0001]
---
/imu_raw
header:
seq: 3022
stamp:
secs: 1559070635
nsecs: 872518062
frame_id: "imu_link"
orientation:
x: 0.0243225097656
y: -0.0449829101562
z: 0.0723571777344
w: 0.996063232422
orientation_covariance: [0.0001, 0.0, 0.0, 0.0, 0.0001, 0.0, 0.0, 0.0, 0.0001]
angular_velocity:
x: 0.79345703125
y: 0.06103515625
z: 7.99560546875
angular_velocity_covariance: [0.0001, 0.0, 0.0, 0.0, 0.0001, 0.0, 0.0, 0.0, 0.0001]
linear_acceleration:
x: 0.078125
y: 0.0244140625
z: 1.00390625
linear_acceleration_covariance: [0.001, 0.0, 0.0, 0.0, 0.001, 0.0, 0.0, 0.0, 0.001]
ekf_template.yaml:
frequency: 50
sensor_timeout: 0.1
two_d_mode: true
print_diagnostics: true
debug: false
debug_out_file: /path/to/debug/file.txt
publish_tf: true
#map_frame: map
odom_frame: odom
base_link_frame: base_footprint
world_frame: odom
odom0: /odom
odom0_config: [?, ?, ?,
?, ?, ?,
?, ?, ?,
?, ?, ?,
?, ?, ?]
odom0_differential: false
imu0: /imu_raw
imu0_config: [?, ?, ?,
?, ?, ?,
?, ?, ?,
?, ?, ?,
?, ?, ?]
imu0_differential: false
Update 2
I made some corrections and followed some recommendations from the robot_localization website: http://docs.ros.org/melodic/api/robot...
I am getting the following result during a circular motion:
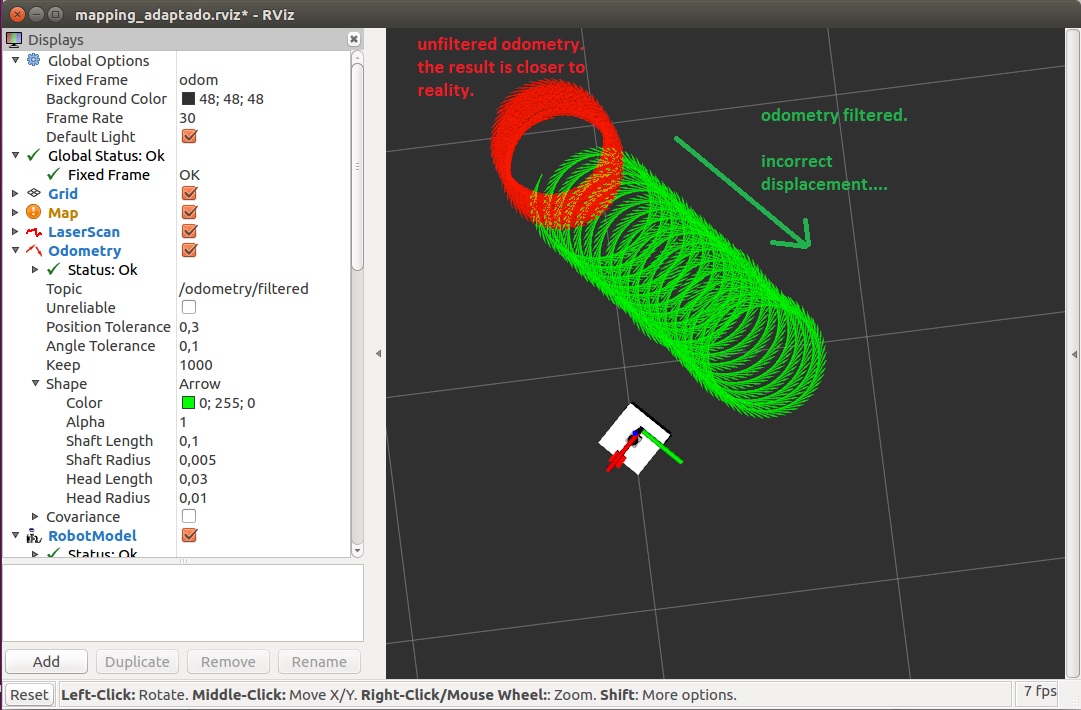
Anyone have any idea what might be happening? If I set the IMU orientation(YAW) as false the problem disappears but I'm not sure if I should do this.
my /odom
---
header:
seq: 21363
stamp:
secs: 1559912897
nsecs: 874729232
frame_id: "odom"
child_frame_id: "base_footprint"
pose:
pose:
position:
x: 0.236642009509
y: 0.0226101278157
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.612814005797
w: 0.790227178917
covariance: [0.001, 0.0, 0.0, 0.0 ...add a comment

