
Change base_link position
How do we change the base_link coordinate centre on autoware? Is there a default one that it automatically uses? If so where is it positioned?
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
How do we change the base_link coordinate centre on autoware? Is there a default one that it automatically uses? If so where is it positioned?
In Autoware coordinate system, base_link is defined at the center of rear wheels as follows.
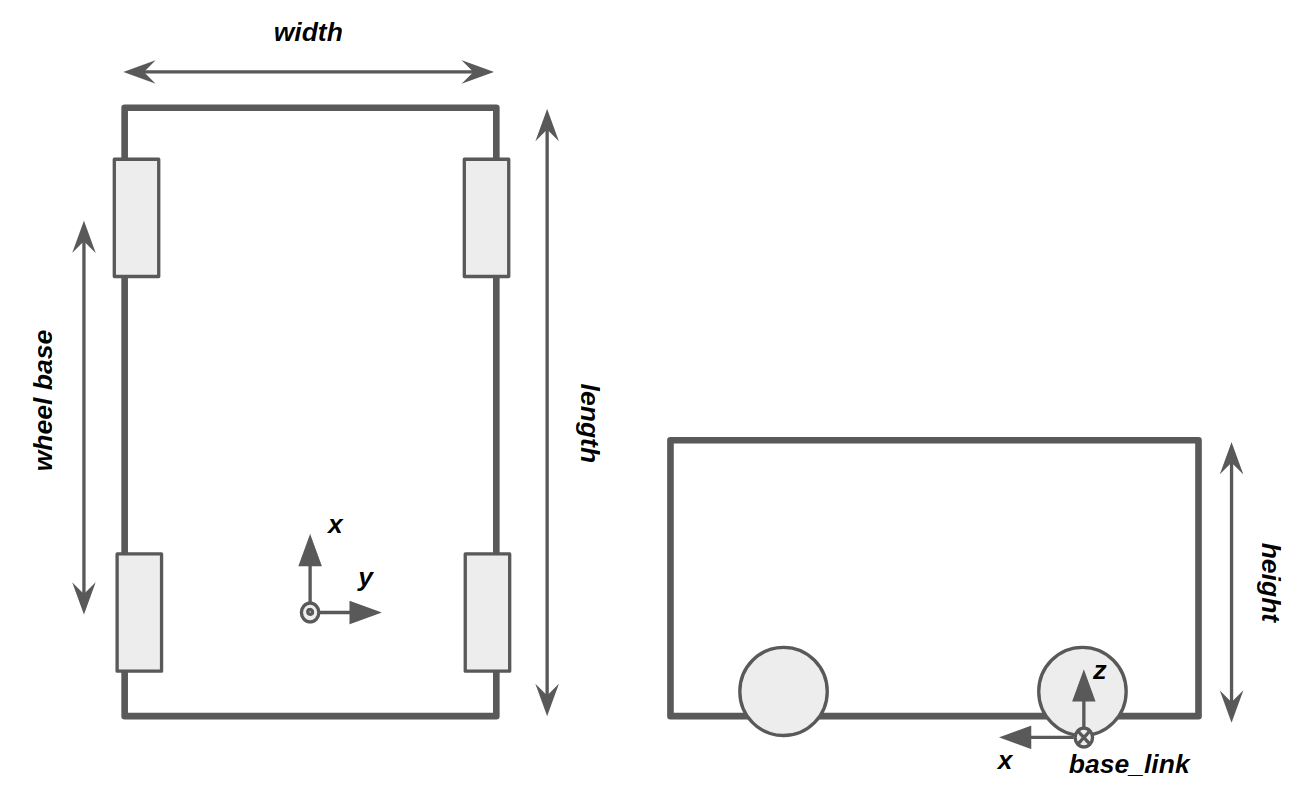
You need to set the relative transform between base_link to velodyne on Setup tab.

Asked: 2019-05-07 19:49:46 -0500
Seen: 358 times
Last updated: May 15 '19
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
Can you expand on what you mean by "change the base_link coordinate centre"?