
How is MoveIt! planning group supposed to be used?

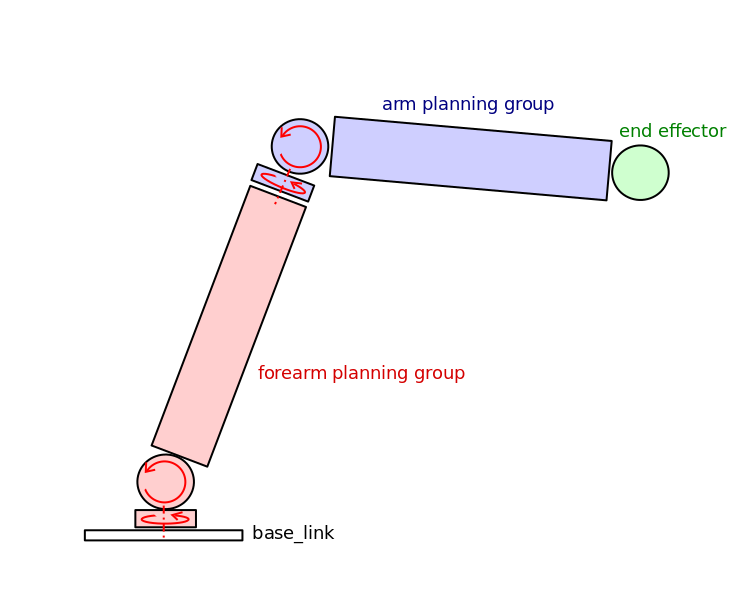
I have a question about use of the MoveIt! planning groups. Say I have a robotic manipulator consisting of two arms (as on the picture below), that can rotate around its axis and around an axis perpendicular to its axis.
When I define two planning groups, one for the bottom arm and one for the upper arm, in the Rviz I have to move those groups separately. And as I was quickly looking through a Python interface tutorial for MoveIt!, it seems that you would need to set the pose of each planning group individually. Now that doesn't look like something you want to do. Ideally you want to move the whole robot at once, right? But if I define the whole robot as one planning group, what is the purpose of the planning groups in the first place?
Can somebody shed some light on this matter?
Thank you.
