
Is it possible for a joint to mimic multiple joints in urdf?
I am trying to model the following robot in ROS Kinetic.
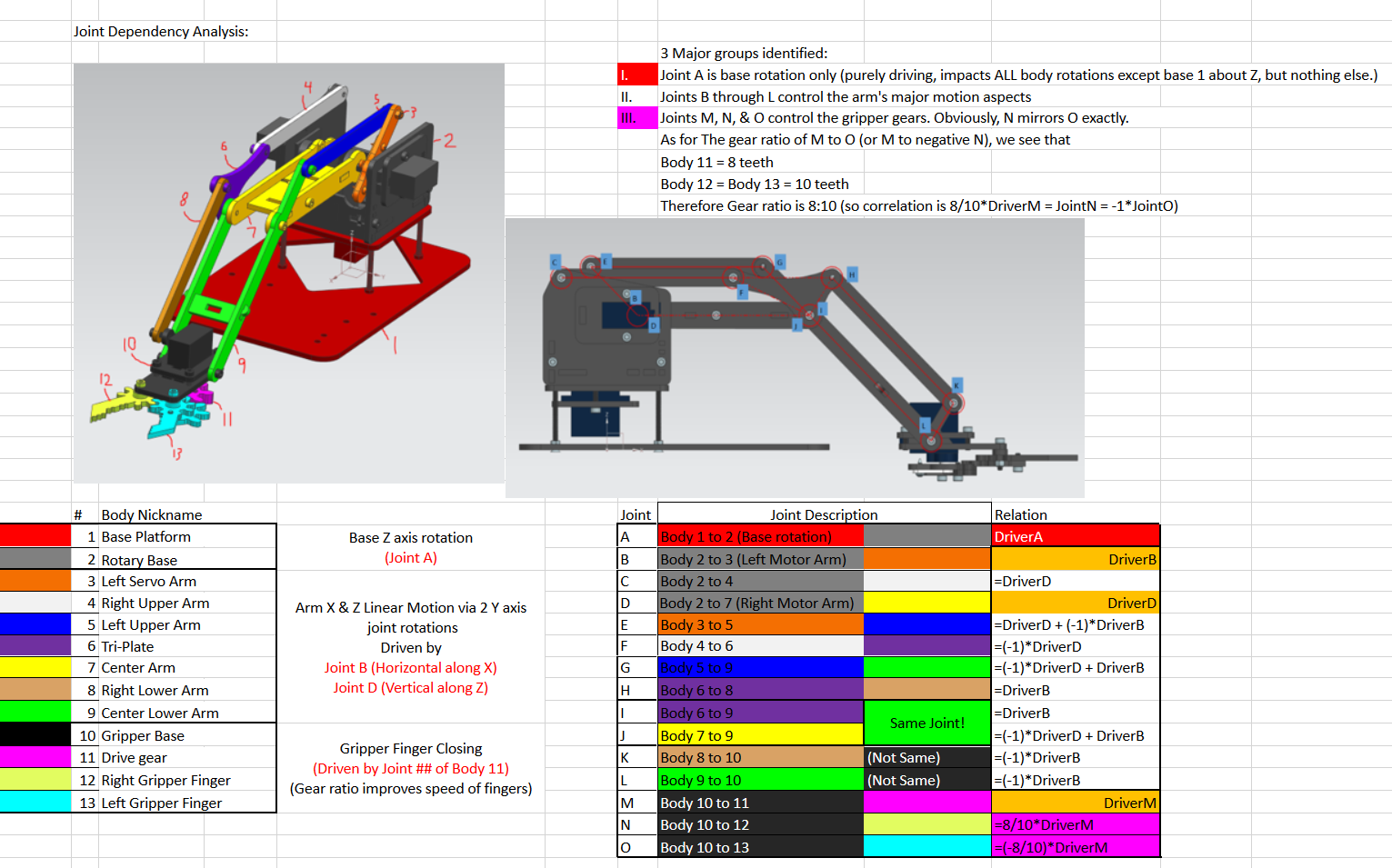
The servos are mounted at the base of the robot and I have to make some of the joints mimic the servo for it to move correctly. The problem is that some of the joints movement are dependent upon both drivers and would need to mimic both. Is this possible in current versions of ROS. Is there some other method of getting this robot working?

No, the
mimictag in urdf does not support contributions of multiple joints to the calculated joint position.Note: this is a limitation of urdf, not "ROS".
Could you please attach your images directly to the question? I've given you sufficient karma to do that.
I've attached the design which lists the dependencies.
Do I have any alternative methods of visualizing the robot with ROS and RVIZ?
If you know the joint angles of the joints along the main kinematic chain (ie: from the base to the flange) you could create a urdf that models that chain (or tree) and that should allow you to visualise it.
Hello, did you finally find a way to model the Mearm robot ?