
frontier_exploration severe warning message when specifying map area to explore.
Hi guys. I can't seem to get frontier_exploration to work for some reason.
Based on the Wiki, I have satisfied all the requirements needed to run the frontier_exploration package.
On my real robot, navigation_stack is confirmed to be working well.
Here is what I did:
[ ... run all required nodes for navigation stack ...]
rosrun exploration_server exploration.launch
rosrun exploration_server exploration.launch console:
NODES
/
exploration_server_node (exploration_server/exploration_server_node)
plugin_client (exploration_server/plugin_client)
ROS_MASTER_URI=http://192.168.31.164:11311
process[plugin_client-1]: started with pid [2452]
process[exploration_server_node-2]: started with pid [2453]
[ INFO] [1554222325.582473407]: Please use the 'Point' tool in Rviz to select an exporation boundary.
[ WARN] [1554222325.682487327]: Change marker topic to exploration_polygon_marker before continuing.
[ INFO] [1554222325.955557215]: Using plugin "static"
[ INFO] [1554222325.968418355]: Requesting the map...
[ INFO] [1554222326.171825922]: Resizing costmap to 384 X 384 at 0.050000 m/pix
[ INFO] [1554222326.271449255]: Received a 384 X 384 map at 0.050000 m/pix
[ INFO] [1554222326.271525899]: Subscribing to updates
[ INFO] [1554222326.285617338]: Using plugin "polygon_layer"
[ INFO] [1554222326.297002975]: Using plugin "sensor"
[ INFO] [1554222326.298983534]: Subscribed to Topics: laser
[ INFO] [1554222326.327030325]: Using plugin "inflation"
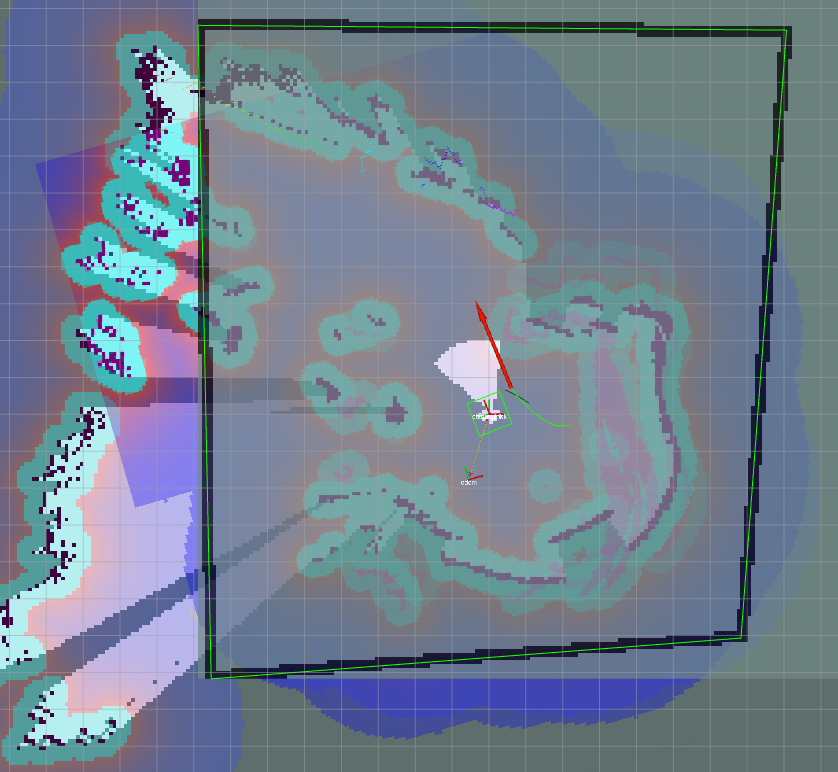
In rViz, I specified the map area for my robot to start exploring by publishing 5 points:
rosrun exploration_server exploration.launch console:
...
[ WARN] [1554222479.089538067]: Please select an initial point for exploration inside the polygon
[ INFO] [1554222482.193100407]: Sending goal
[ INFO] [1554222482.209814608]: Updating polygon
[ INFO] [1554222482.209888753]: Requesting a goal
[ INFO] [1554222482.210900543]: Robot is now at 0.007659, 0.006953
[ INFO] [1554222482.210984663]: Robot moving to: 1.000000, 1.000000
Warning: class_loader.ClassLoader: SEVERE WARNING!!! Attempting to unload library while objects created by this loader exist in the heap! You should delete your objects before attempting to unload the library or destroying the ClassLoader. The library will NOT be unloaded.
at line 122 in /tmp/binarydeb/ros-melodic-class-loader-0.4.1/src/class_loader.cpp
I'm expecting the robot to start exploring the specified area. However, that is not the case as the robot does not move. What could be the problem?
Regards,

Have you ever figured out the solution to this issue? I'm running into the exact same one
@giraffeshooves I ended up using explore_lite package and it worked well.