
Connect camera TF tree and robot TF tree

Hello, I'm a newer of ROS.
I want to add the kinect camera to my Industrial robot working environment.
So, I follow this tutorials to set up all of confirgure.
When I launch the moveit demo.laucnch file, it shows error messages below.
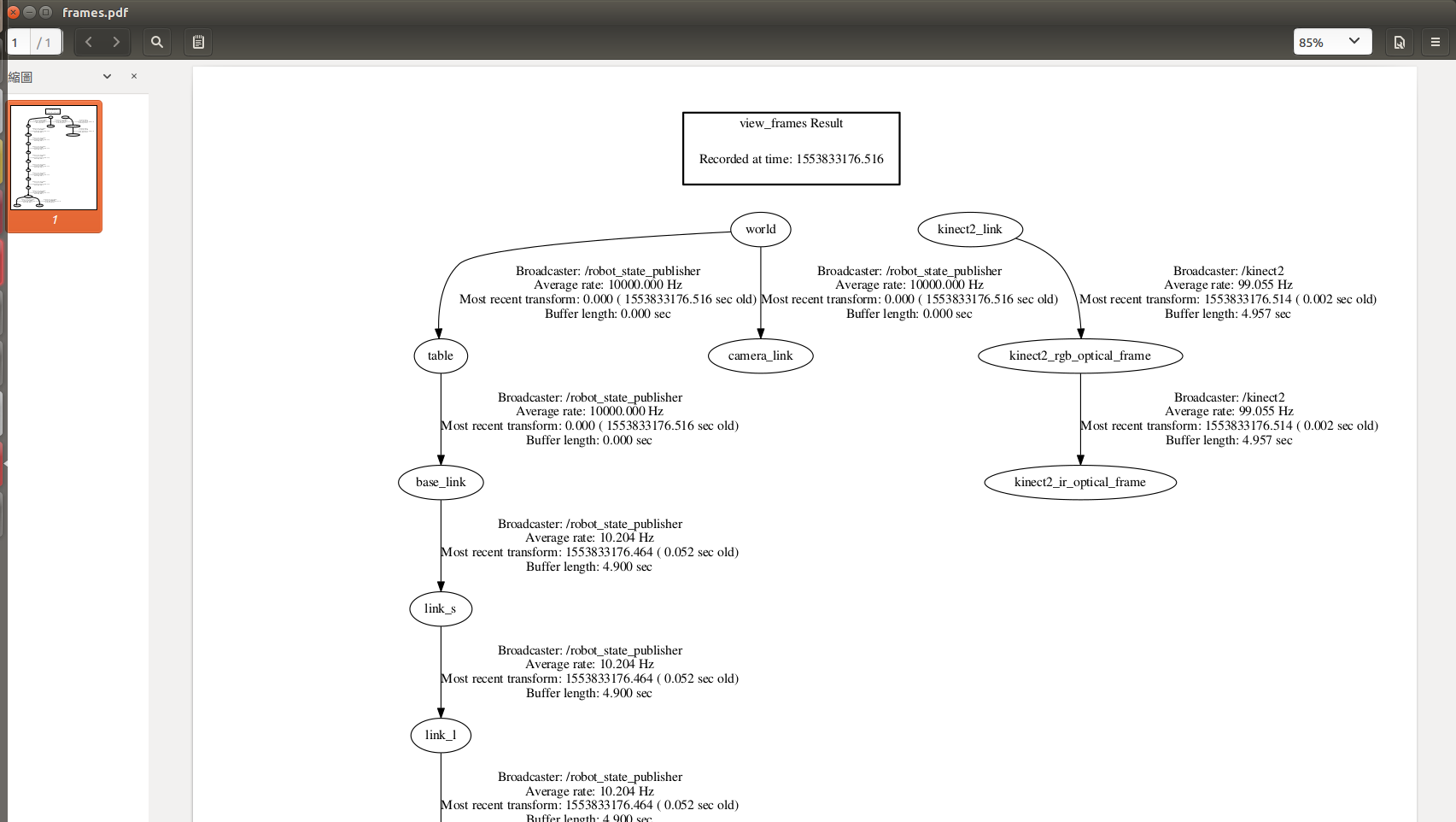
[ WARN] [1553832710.822016764]: No transform available between frame 'kinect2_rgb_optical_frame' and planning frame '/world' (Could not find a connection between 'world' and 'kinect2_rgb_optical_frame' because they are not part of the same tree.Tf has two or more unconnected trees.) [ WARN] [1553832710.822063875]: No transform available between frame 'kinect2_link' and planning frame '/world' (Could not find a connection between 'world' and 'kinect2_link' because they are not part of the same tree.Tf has two or more unconnected trees.) [ WARN] [1553832710.822099052]: No transform available between frame 'kinect2_ir_optical_frame' and planning frame '/world' (Could not find a connection between 'world' and 'kinect2_ir_optical_frame' because they are not part of the same tree.Tf has two or more unconnected trees.)
And this is the situation of TF tress.
Anyone can help me?
Thanks a lot.
add a comment

