
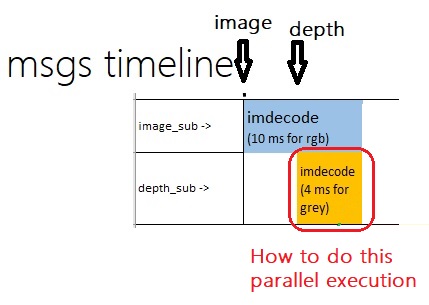
Executing two callbacks of two subscribers parallelly. How?
If one sub1.callback is on execution and meanwhile msg arrives on other sub2. I want to process sub2.callback parallely. Is it possible? How?
ros::Subscriber image_sub= nh.subscribe("/rgb, 2, &class::imCallback, &class);
ros::Subscriber depth_sub= nh.subscribe("/depth", 2, &class::depthCallback, &class);
I read many posts on callback queues, MultiThreadedSpinner, boost. I am confused which way is good for my application !!
add a comment

