
gmapping parameter tuning
 Hello,
Hello,
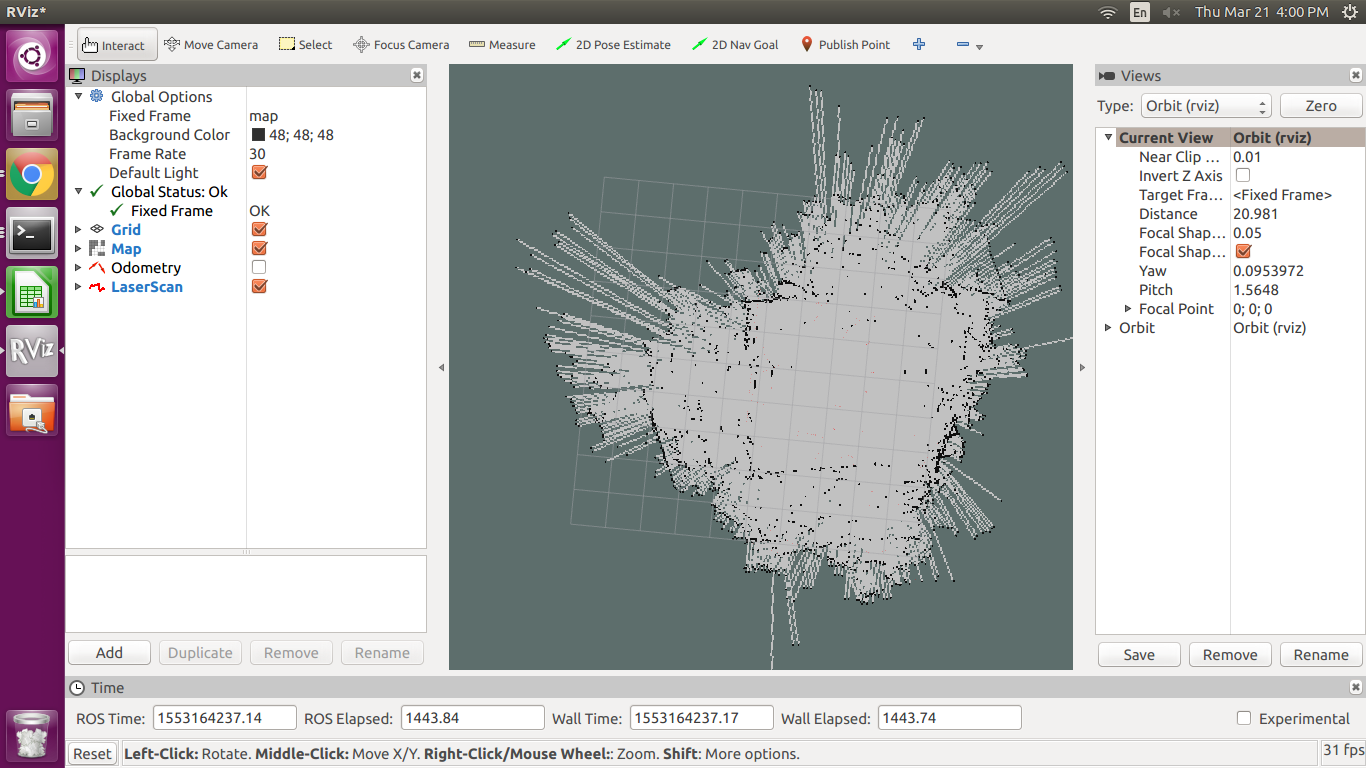
I ran gmapping and i am able to get this map. I have Rplidar and wheel encoders and the required transforms. Are there any parameters that you guys think i can tune after looking at the map right off the bat. And any other default combination of parameters that would make the map better would be very much appreciated. I will be happy to provide further information if necessary. Thanks in advance.
add a comment
