
Bad stereo mapping in RTABmap

Hi,
I have a stereo camera, Intel T265 and I am getting strange stereo map:
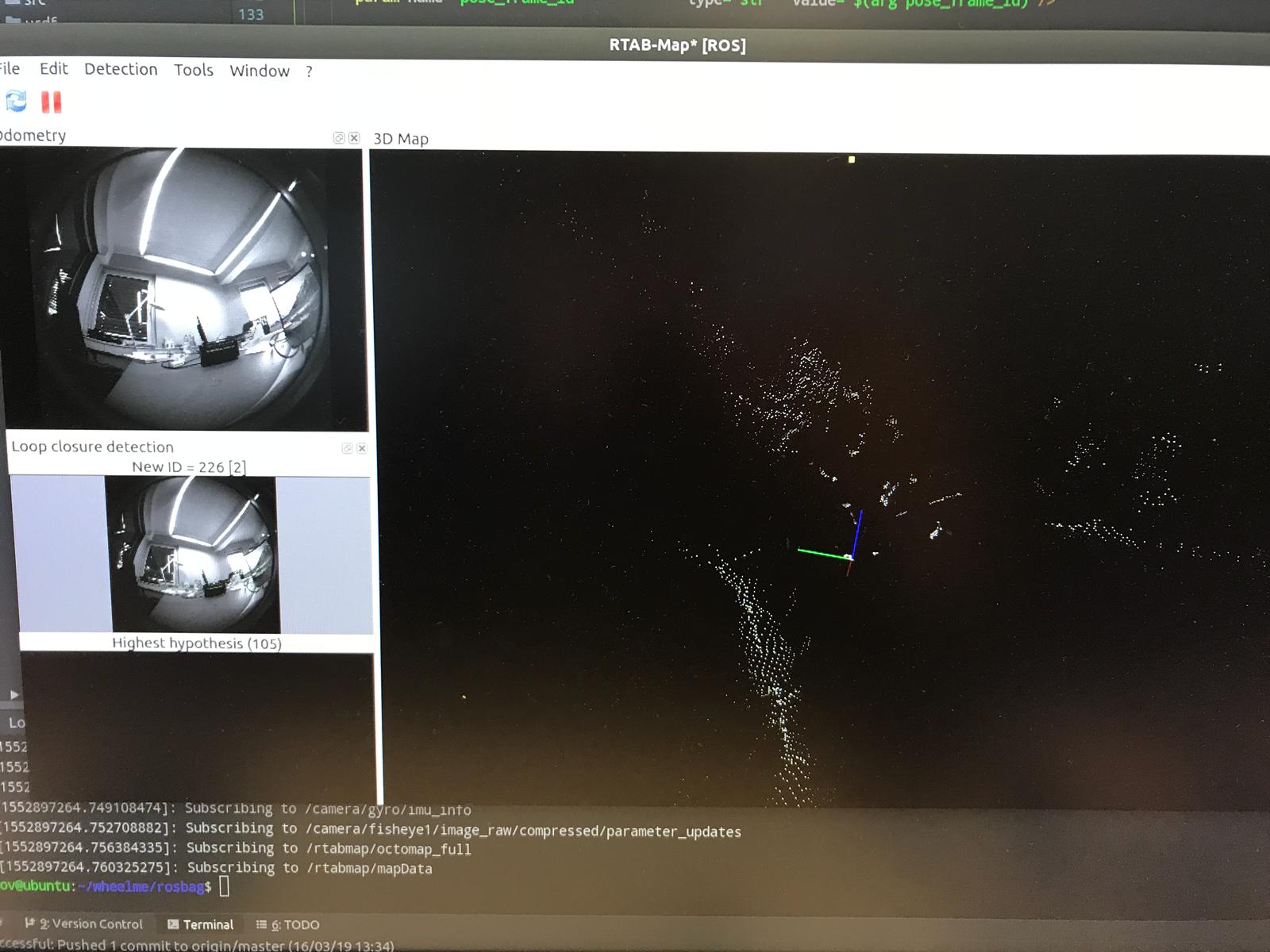
Why is that? I have also recorded the bag: https://drive.google.com/file/d/1sjh1...
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Hi,
I have a stereo camera, Intel T265 and I am getting strange stereo map:
Why is that? I have also recorded the bag: https://drive.google.com/file/d/1sjh1...
rtabmap requires rectified stereo images as input. There are a lot of right images missing from the bag, but I'm still able to try stereo_image_proc to rectify the images:
$ rosrun stereo_image_proc stereo_image_proc /left/image_raw:=/camera/fisheye1/image_raw /left/camera_info:=/camera/fisheye1/camera_info /right/image_raw:=/camera/fisheye2/image_raw /right/camera_info:=/camera/fisheye2/camera_info
Raw:
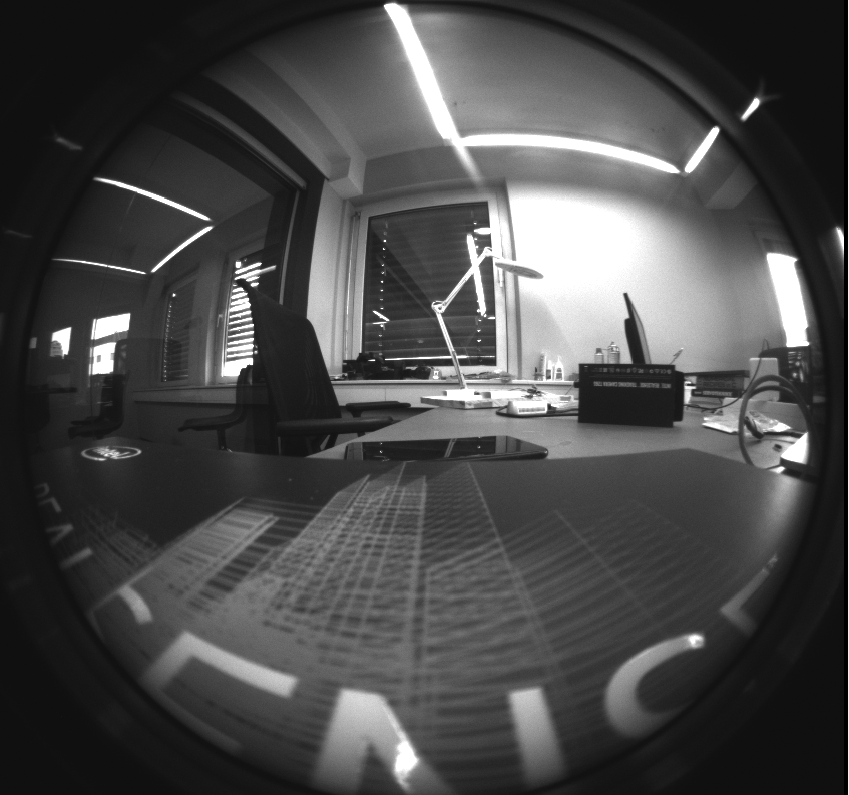
Rectified:
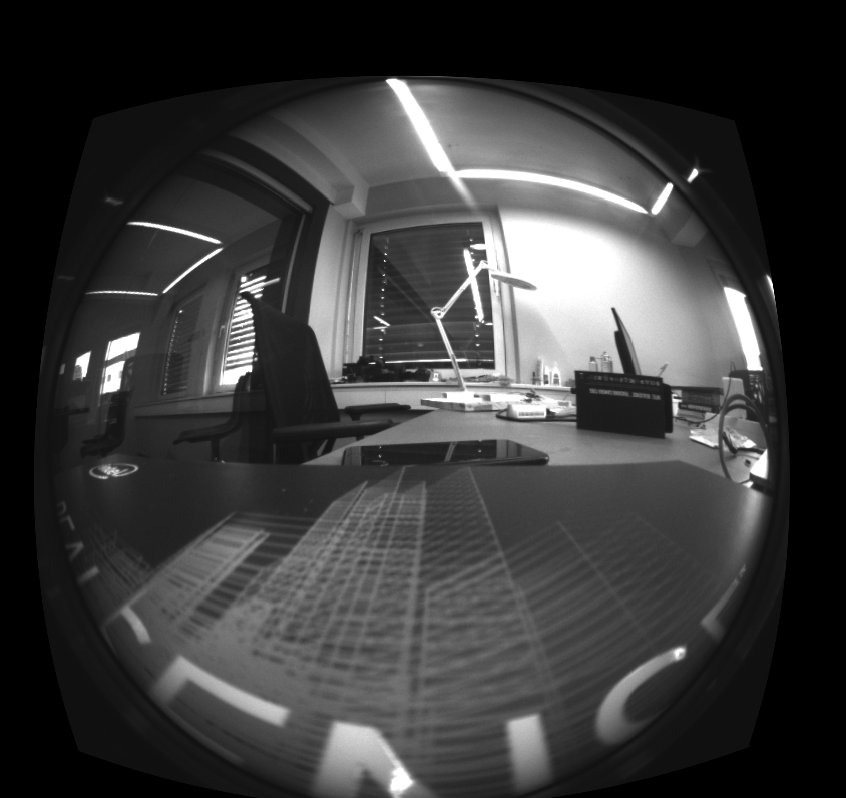
As you can see, the rectification doesn't work with the current calibration info. Here is a tutorial to calibrate stereo cameras: http://wiki.ros.org/camera_calibratio...
cheers,
Mathieu
@matlabbe Hi thank you, I already figured this out but gave up on a camera for a while as calibrating was not perfect. Meanwhile, can you have a look at my new question? https://answers.ros.org/question/3193...
Just to let you know ROS doesn't support fisheye camera calibration and fisheye image proc pipeline
Asked: 2019-03-18 03:34:55 -0500
Seen: 659 times
Last updated: Mar 22 '19
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
