
Controller failed with error code INVALID_JOINTS
Hello, I’m trying to achieve pick and place in gazebo for panda arm by using moveit+rviz to plan motion. I’m getting below error on the terminal from which i launch moveit_planning _execution.launch file.
Controller panda/panda_hand_controller failed with error code INVALID_JOINTS
here is my config/controllers.yaml file from moveit side
controller_manager_ns: controller_manager
controller_list:
- name: panda/panda_arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- panda_joint1
- panda_joint2
- panda_joint3
- panda_joint4
- panda_joint5
- panda_joint6
- panda_joint7
- name: panda/panda_hand_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- panda_finger_joint1
- panda_finger_joint2
Below is my joint_names.yaml file
controller_joint_names: ['panda_joint1', 'panda_joint2', 'panda_joint3', 'panda_joint4', 'panda_joint5', 'panda_joint6', 'panda_joint7', ’panda_finger_joint1’, ’panda_finger_joint2’]
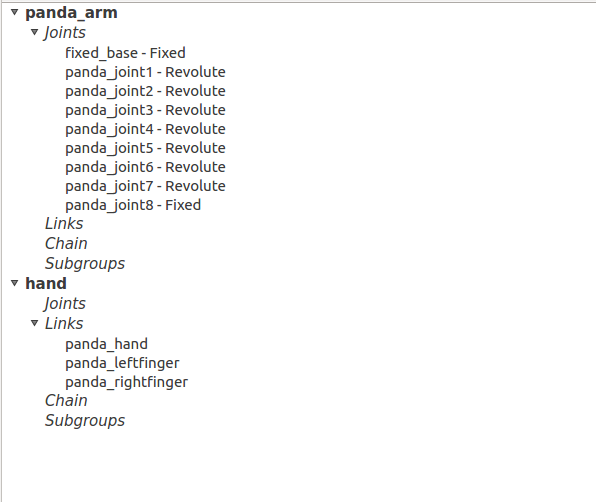
About moveit planning groups from setup assistant tool, below are the groups i have created. I’m using panda_arm as planning group in my code
Can someone tell me how to solve or debug this issue?
Update 1
On the terminal from which i spawn gazebo and controllers i get below error
Joints on incoming goal don't match the controller joints.
My suspect is that these errors are occurring because of following reason
I’m using "panda_arm " as planning group which doesn’t include finger_joints (in this case i’m doing as suggested in moveit_tutorial. ) Here can anyone suggest me how planning group should be in moveit setup_assistant?
Update 2
In gazebo, robot approaches the object and when it should open the finger joints( comparing to fake trajectory execution in rviz) robot stops the trajectory execution.


Hey - I think we have the same problem, Running moveit+rviz with the Pandas current ros-melodic-franka-description. When you run the standard demo.launch do you get a Clump of Panda joints in the center of your workspace? Screenshot of MoveIt
MoveIt! Quickstart in RViz
I've followed the setup assistant and tried making a couple other joint configurations - but nothing yet. : Setup_assistant_tutorial
Could it be from the latest melodic-franka-description?
@lab.engineering: it's much more likely you're running into #q272692.
@lab.engineering: For me everything works fine in RVIZ. Even with demo.launch i'm able to see pick and place happening in RVIZ. i have problem in gazebo that panda arm reaches till the pose where it should open up the finger joints but finger_joints are not moving.
@gvdhoorn: any suggestions on this issue by looking at update 2??