
RViz receives lidar messages but does not display (not about size)
Hello I am trying to visualize LaserScan under /lidar topic in RViz. LaserScan receives messages but RViz does not visualize LaserScan. I already checked this question but I guess my problem is not same with it.
rostopic echo

Please provide the output of
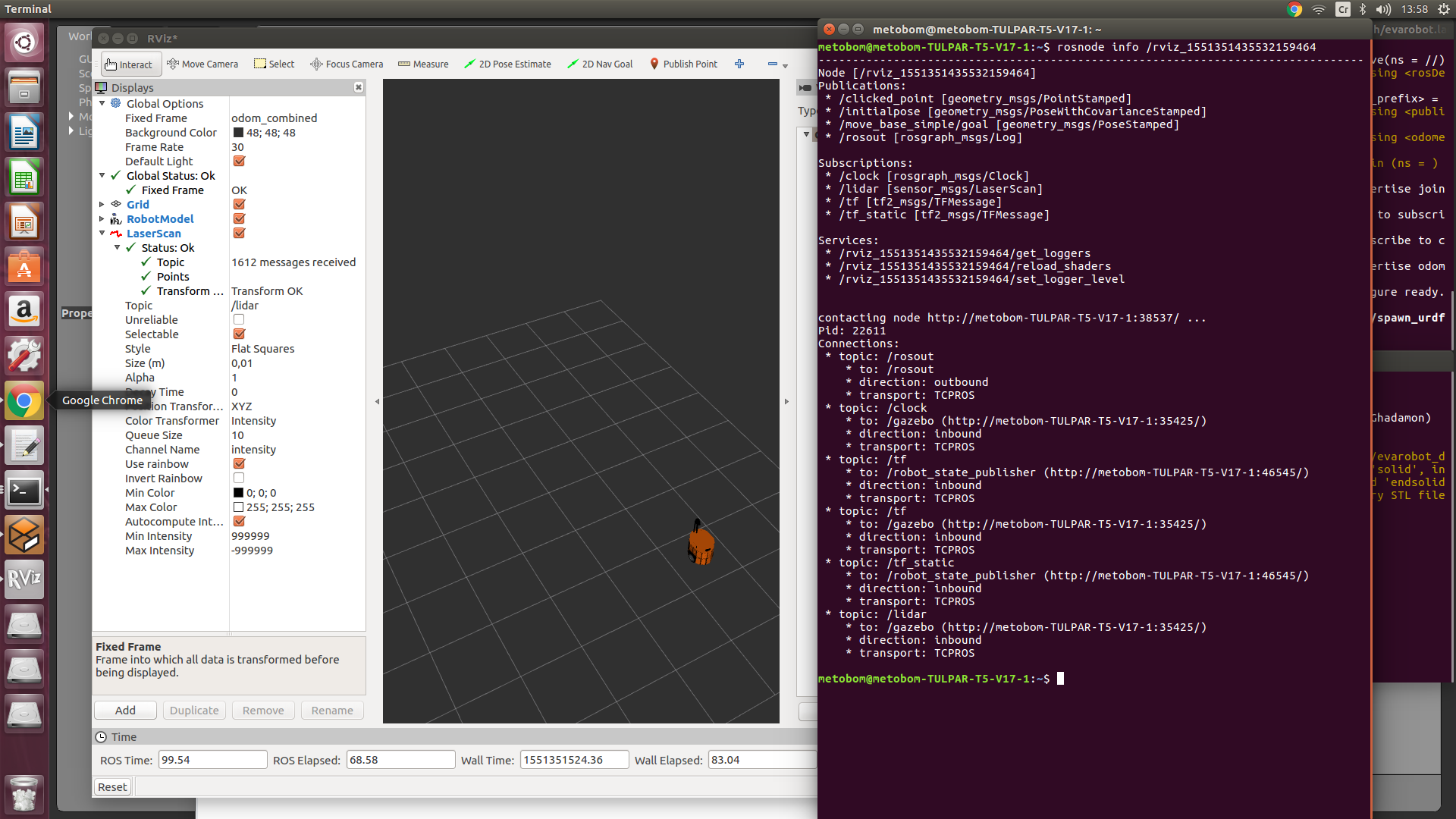
rosnode info /rviz...(tab complete it) as well as a picture of the configuration of yourrviz(especially the contents of the tabsfixed_frameand yourLaserScan). Or link to the respective*.rvizconfig you are using...I edited @mgruhler. Also I found out source of the problem in this question is this laser thing.
@metobom seems okay, so far.
Can you have a look at
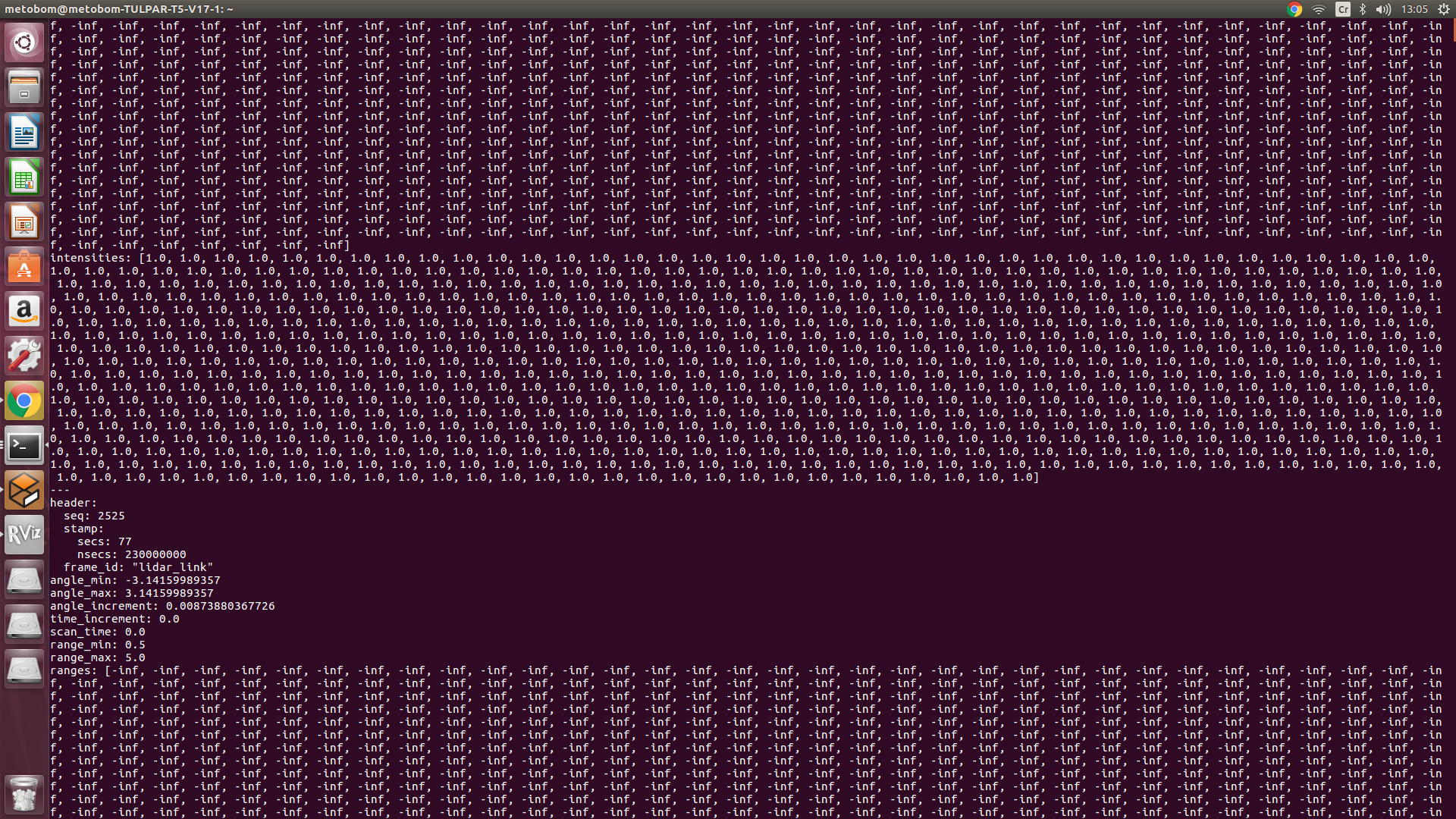
rostopic echo /lidarand see if there is any data in there? also, what kind of lidar do you have?@mgruhler my lidar is RPLidar 360 and also I added rostopic echo to my question.
@metobom I don't see any output of
rostopic echo...@mgruhler my bad I re-edited.
In rviz, can you uncheck "Autocompute intensity Bounds" and then change the intensity min and max value to actually have Min intensity < Max intensity ? Also, (just to be sure) do you at least have obstacles closer than 5meters of your robot in your Gazebo world ?
The output of
rostopic echoyou've shown only contains NANs for the range values. If all the values in the laser_scan message are NAN then there is nothing for RVIZ to show so this would be normal.But there are obatacles in my gazebo world. Why would they be NANs?
The why I can't answer without more information. But the screen shot you show only contains -inf values, there is no actual finite data there!
If all of the values in the laser_scan message are -inf it's most likely that you've placed the simulated lidar inside a solid object in gazebo. This means that it's reading 100% values closer than it's minimum sensing distance, so no valid readings are produced.
I second @PeteBlackerThe3rd the problem you face both here and in your other question is that there is no valid laser data. I have to remember to keep asking earlier about simulation vs real hardware, though :-) RPLidar 360 is real, not sim...
@metobom Please share how you spawn your simulation...
i.e. the configuration and launch files...
Here is my launch file. And this is evarobot's urdf file. I hope you mentioned these @mgruhler.