
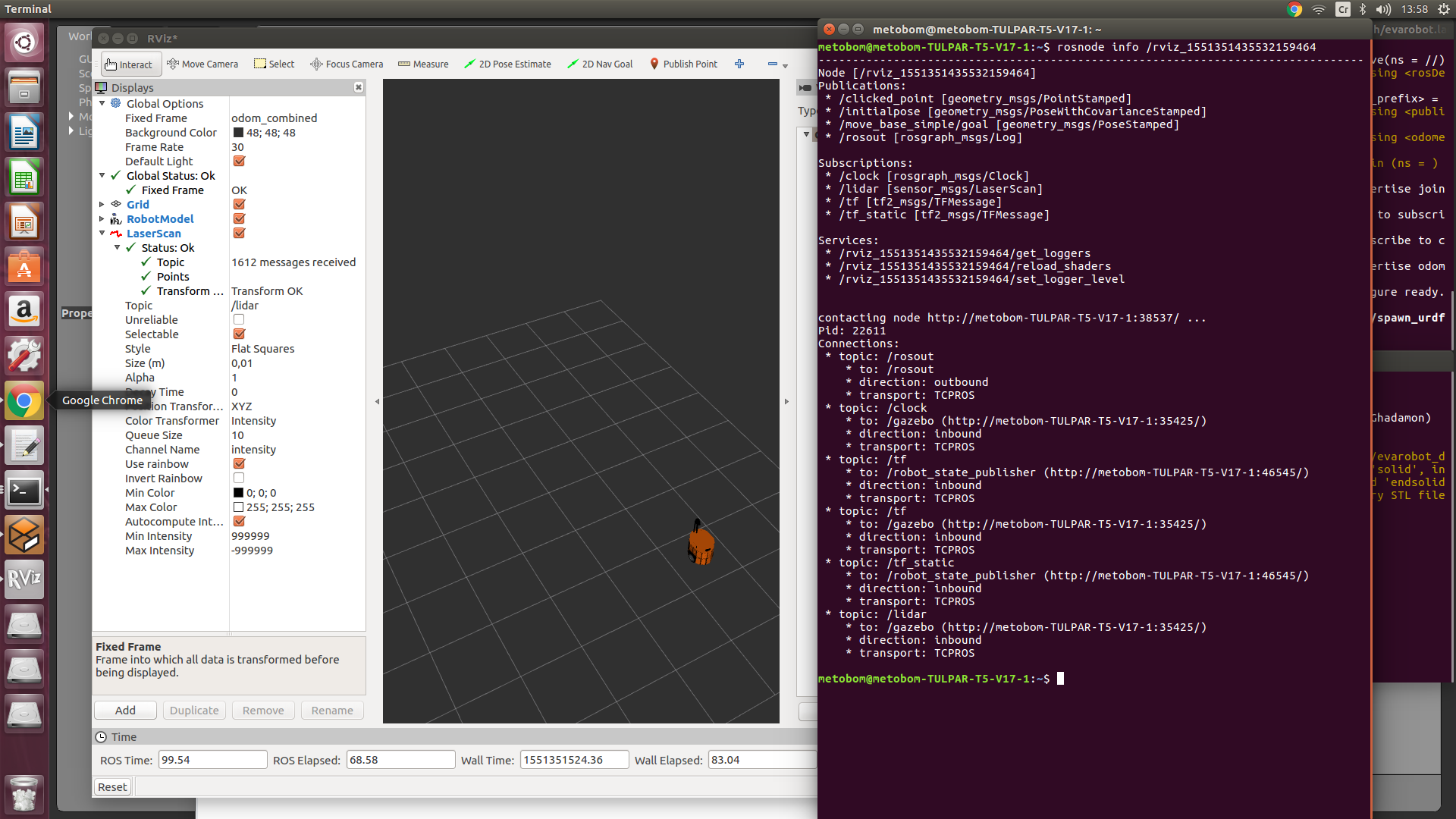
RViz receives lidar messages but does not display (not about size)
Hello I am trying to visualize LaserScan under /lidar topic in RViz. LaserScan receives messages but RViz does not visualize LaserScan. I already checked this question but I guess my problem is not same with it.
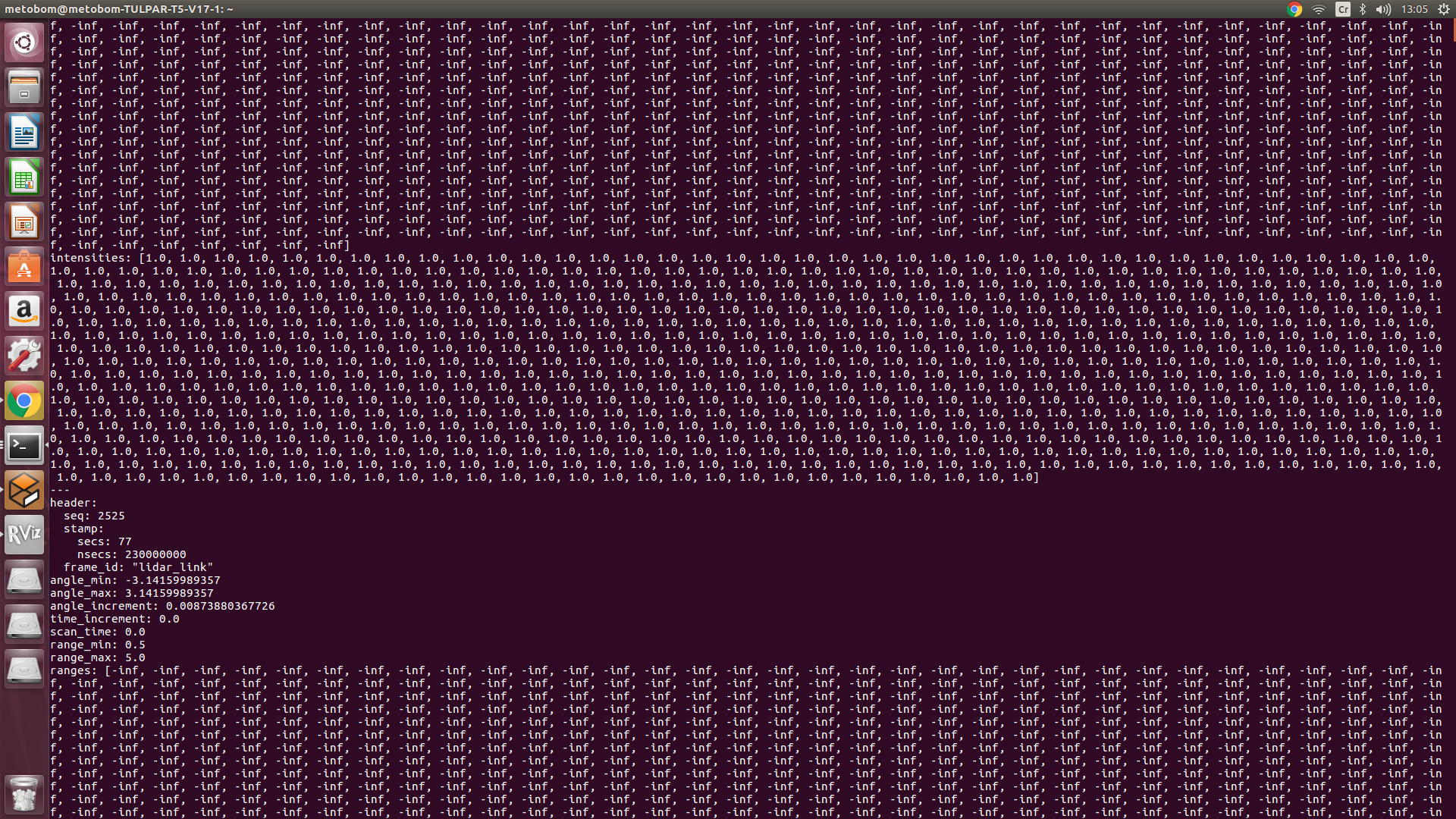
rostopic echo

Please provide the output of
rosnode info /rviz...(tab complete it) as well as a picture of the configuration of yourrviz(especially the contents of the tabsfixed_frameand yourLaserScan). Or link to the respective*.rvizconfig you are using...I edited @mgruhler. Also I found out source of the problem in this question is this laser thing.
@metobom seems okay, so far.
Can you have a look at
rostopic echo /lidarand see if there is any data in there? also, what kind of lidar do you have?@mgruhler my lidar is RPLidar 360 and also I added rostopic echo to my question.
@metobom I don't see any output of
rostopic echo...@mgruhler my bad I re-edited.
In rviz, can you uncheck "Autocompute intensity Bounds" and then change the intensity min and max value to actually have Min intensity < Max intensity ? Also, (just to be sure) do you at least have obstacles closer than 5meters of your robot in your Gazebo world ?
The output of
rostopic echoyou've shown only contains NANs for the range values. If all the values in the laser_scan message are NAN then there is nothing for RVIZ to show so this would be normal.