
Define KDL tree structure in C++

This question is not completely related to ROS. However since KDL is used heavily inside ROS, I am requesting and posting here.
I have a URDF file, which I could parse and build KDL tree using kdl_parser using the following way:
KDL::Tree my_tree;
if (!kdl_parser::treeFromFile("robot.urdf", my_tree)){
std::cout << "Failed to construct kdl tree"<< std::endl;
}
However, due to a project limitation, I can not use ROS and hence unable to use kdl_parser. Please note that I am working on Windows OS. Below is a snippet of KDL tree of my robot which contains only revolute joints:
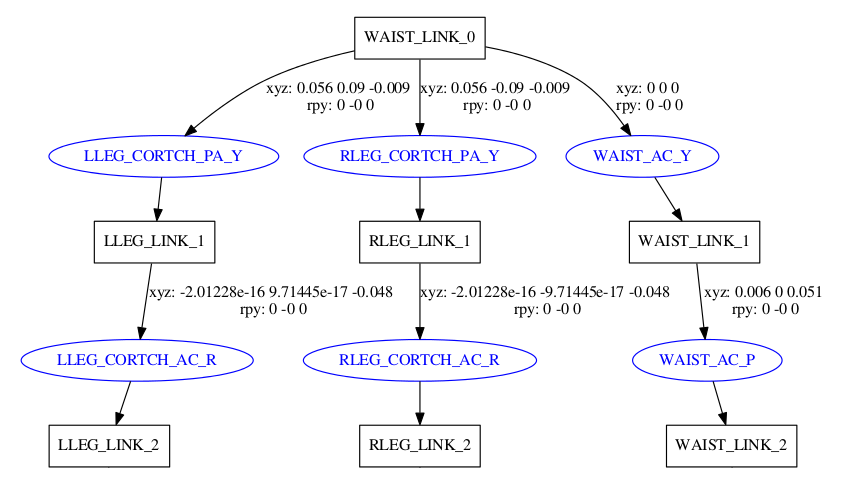
Please note that the above image is a part of the big tree, however, to keep this post shorter I cropped it and added leaf nodes.
Since I am not able to parse the URDF file, I am thinking to construct the KDL tree manually. Although, it is not good practice and I am limited with resources here.
Can someone please explain me how to construct a KDL tree for the above image? All the joints are revolute and I am only interested in performing forward Kinematics.
