
TF not moving in navigation stack
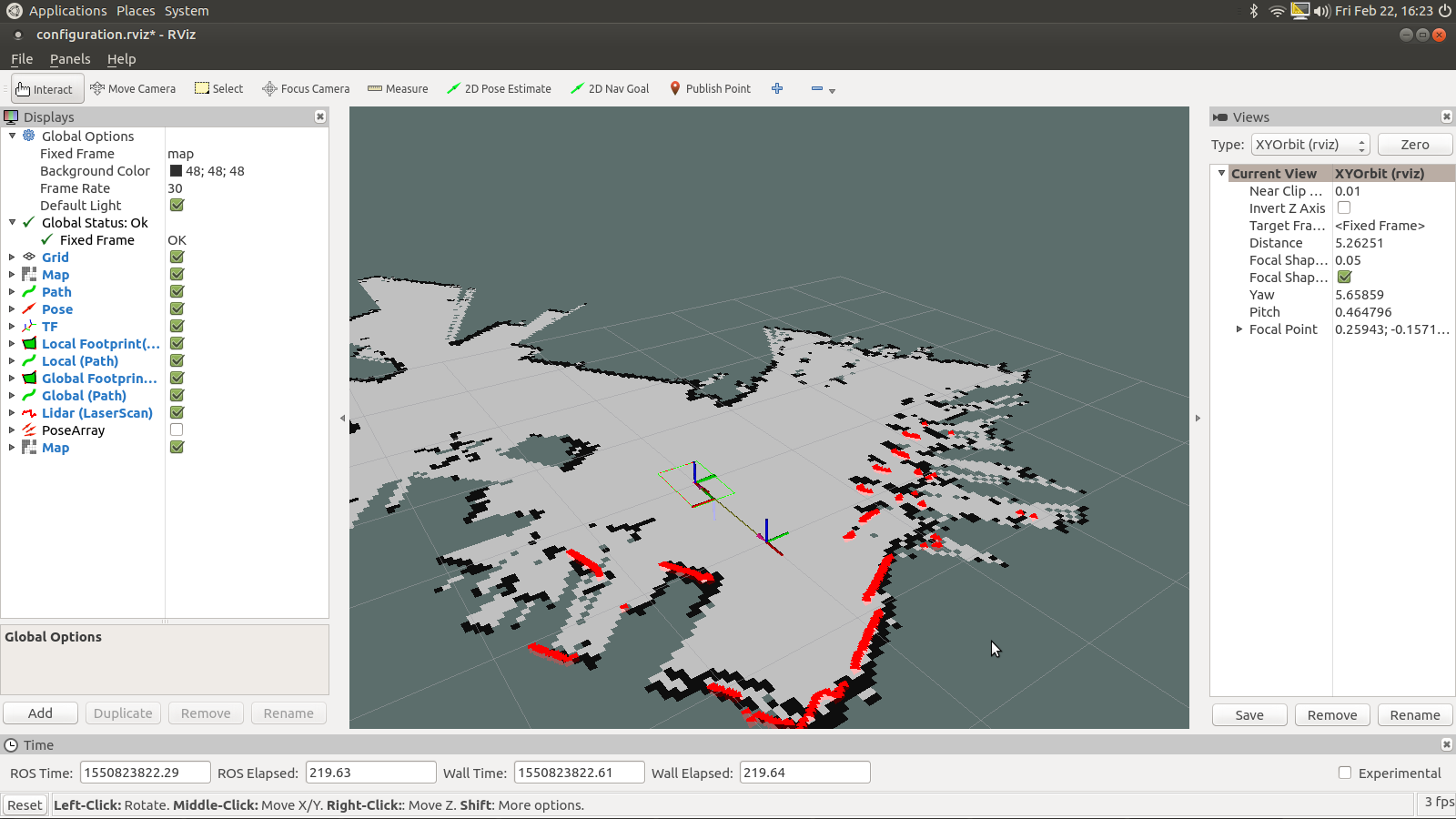
Hi there, I'm following the wiki tutorial for the navigation stack, however, when I launch it, - the tf in the map seems not moving when I physically move it and - it doesn't move as well when I tried to use 2D pose estimate as well. But the local footprint polygon and laser scanning data flashes continuously between the tf and the selected location.
Anyone knows what the problem is? (will that be because of the static tf publisher of odom to footprint?)
Here's the robot_configuration.launch
<launch>
<node name="ydlidar_node" pkg="ydlidar" type="ydlidar_node" output="screen"/>
<node pkg="tf" type="static_transform_publisher" name="map_to_odom"
args="0.0 0.0 0.0 0 0 0.0 /map /odom 40" />
<node pkg="tf" type="static_transform_publisher" name="odom_to_basefootprint"
args="0.0 0.0 0.0 0 0 0.0 /odom /base_footprint 40" />
<node pkg="tf" type="static_transform_publisher" name="base_footprint_to_base_link"
args="0 0.0 0 0.0 0.0 0.0 /base_footprint /base_link 40" />
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser_frame"
args="0.2245 0.0 0 1.57 3.14 0.0 /base_link /laser_frame 40" />
<node pkg="rf2o_laser_odometry" type="rf2o_laser_odometry_node" name="rf2o_laser_odometry">
<param name="laser_scan_topic" value="/scan"/>
<param name="base_frame_id" value="/base_link"/>
<param name="odom_frame_id" value="/odom" />
<param name="freq" value="6.0"/>
</node>
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find mobilet_2dnav)/rviz_cfg/configuration.rviz"/>
</launch>
and the move_base.launch
<launch>
<master auto="start"/>
<!-- Run the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find mobilet_2dnav)/maps/office_4.yaml"/>
<!--- Run AMCL -->
<include file="$(find amcl)/examples/amcl_diff.launch" />
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find mobilet_2dnav)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find mobilet_2dnav)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find mobilet_2dnav)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find mobilet_2dnav)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find mobilet_2dnav)/param/base_local_planner_params.yaml" command="load" />
</node>
</launch>
Any help will be appreciated! Thanks
Edit: followed Delb's suggestions, I changed parameter of the rf2o_laser_odometry node:
<node pkg="rf2o_laser_odometry" type="rf2o_laser_odometry_node" name="rf2o_laser_odometry" output="screen">
<param name="laser_scan_topic" value="/scan"/> # topic where the lidar scans are being published
<param name="odom_topic" value="/odom_rf2o" /> # topic where tu publish the odometry estimations
<param name="publish_tf" value="true" /> # wheter or not to publish the tf::transform (base->odom)
<param name="base_frame_id" value="/base_footprint"/> # frame_id (tf) of the mobile robot base. A tf transform from the laser_frame to the base_frame is mandatory
<param name="odom_frame_id" value="/odom" /> # frame_id (tf) to publish the odometry estimations
<param name="init_pose_from_topic" value="" /> # (Odom topic) Leave empty to start at point (0,0)
<param name="freq" value="6.0"/> # Execution frequency.
<param name="verbose" value="true" />
</node>
and my tf_tree: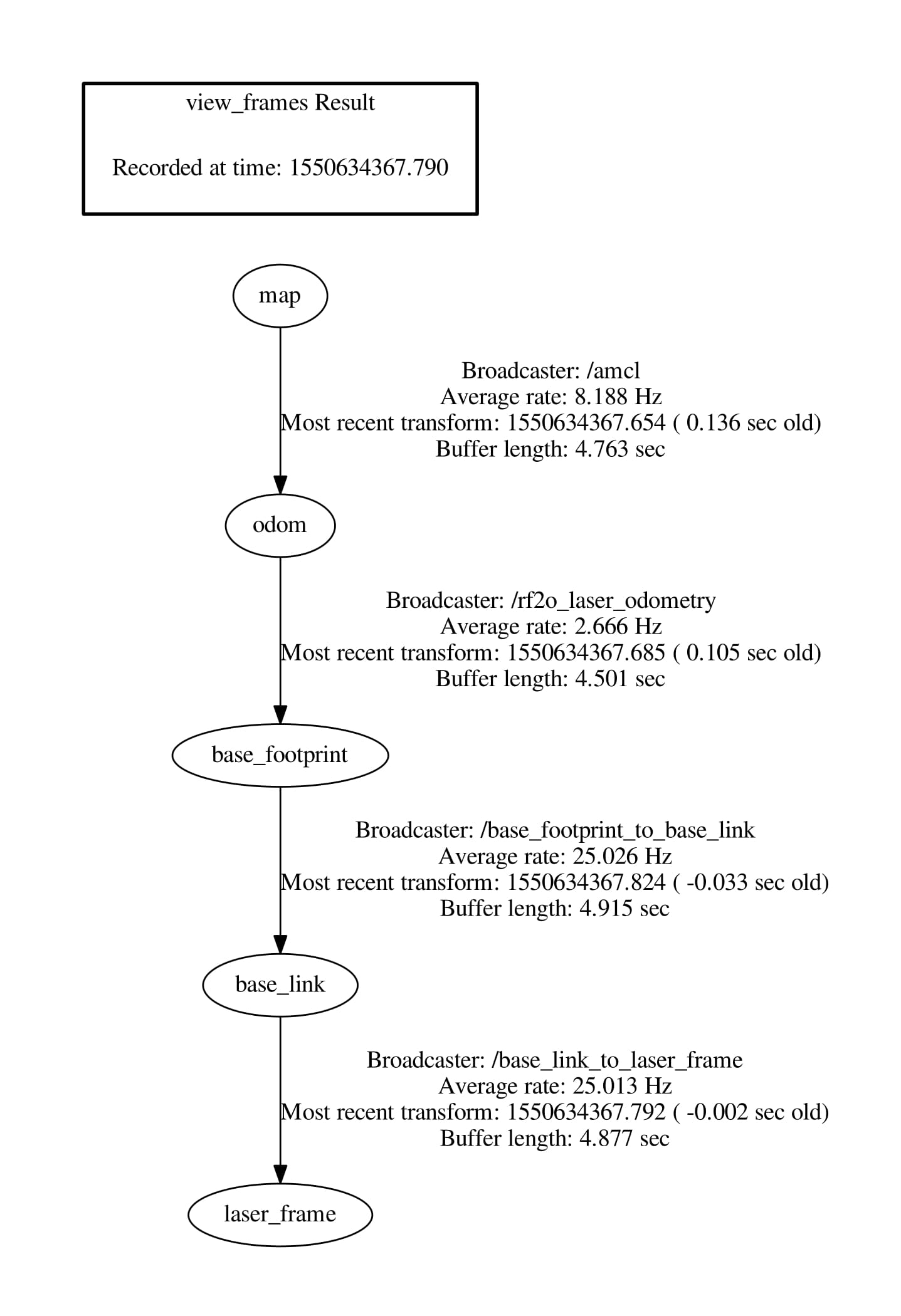
add a comment

