
Own nav path has closed loop in rviz
Hi, I want to make simple path following for differential drive robot,
So, I generated nav.msg/Path with own points and publish it, but in rviz I see my path with connection between start and end points, but I want see just my arc.
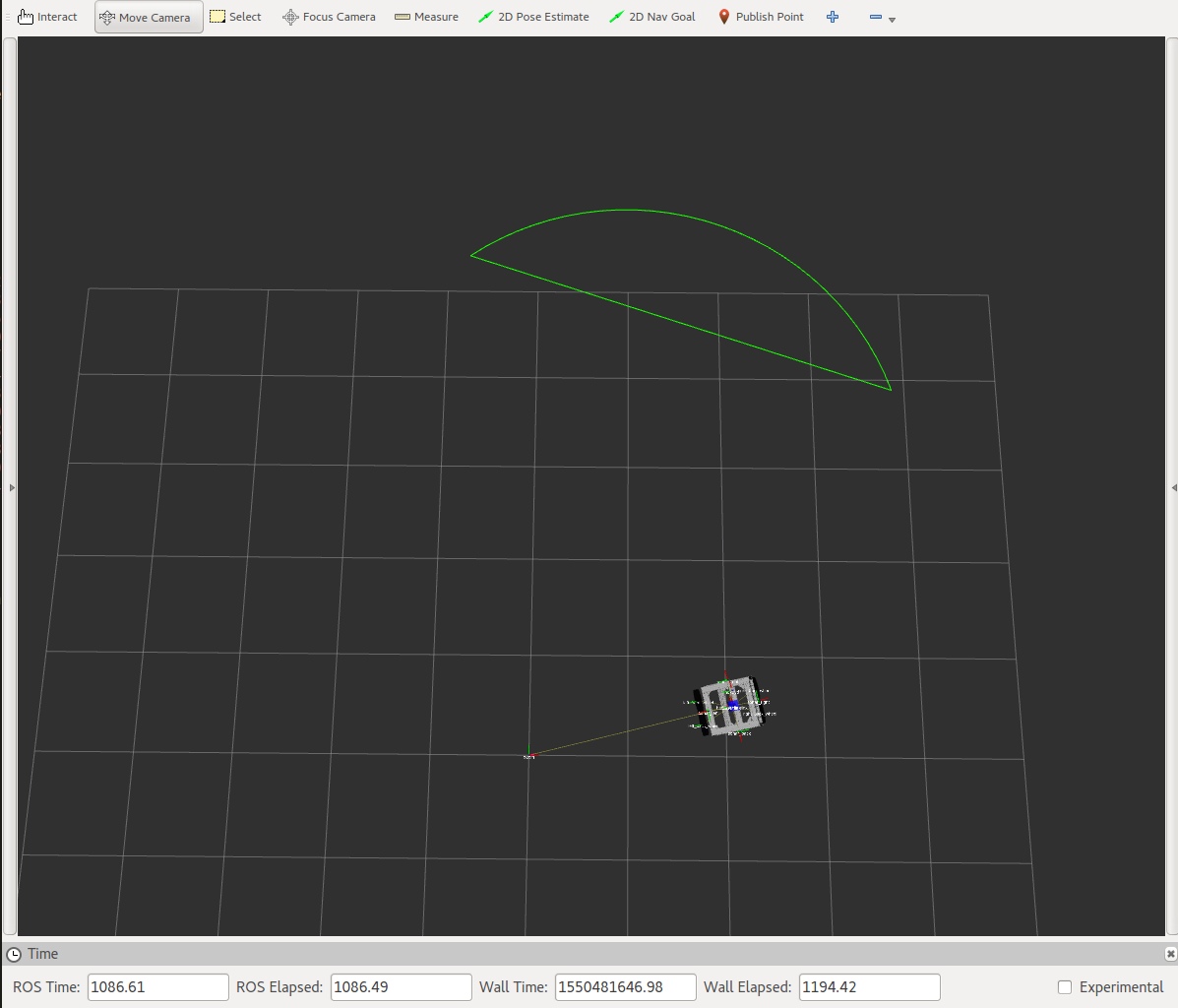
When I use the code from Publisher about trajectory path to generate path from odom topic to path topic, I see not closed trajectory, that what I want to generate in my own path publisher.

What is my mistake?
How publish own points like nav.msg/Path correctly?
My source of publish node:
#!/usr/bin/env python
import rospy
from nav_msgs.msg import Path
from nav_msgs.msg import Odometry
from geometry_msgs.msg import PoseStamped
from geometry_msgs.msg import Pose
path = Path()
path.header.frame_id = 'odom'
seq = 0
def cartesian_to_path(x, y):
global seq
path.header.stamp = rospy.Time.now()
for i, xi in enumerate(x):
pose = PoseStamped()
pose.header.stamp = rospy.Time.now()
pose.header.frame_id = 'odom'
pose.header.seq = seq
pose.pose.position.x = xi
pose.pose.position.y = y[i]
pose.pose.position.z = 0
path.poses.append(pose)
seq += 1
print(path)
path_pub.publish(path)
rospy.init_node('path_node')
path_pub = rospy.Publisher('/path', Path, queue_size=10)
r = rospy.Rate(1)
if __name__ == '__main__':
x = [ 3.86600947, 3.80181702, 3.72560205, 3.6376916 , 3.53846288,
3.42834168, 3.30780053, 3.17735667, 3.03756983, 2.88903983,
2.73240402, 2.5683345 , 2.3975353 , 2.22073931, 2.03870516,
1.85221396, 1.66206593, 1.46907699, 1.27407525, 1.07789747,
0.88138542, 0.68538235, 0.4907293 , 0.29826151, 0.10880487,
-0.07682768, -0.25783959, -0.43345415, -0.60291779, -0.76550335]
y = [3.88656062, 4.07229724, 4.25343267, 4.42918964, 4.598814 ,
4.7615779 , 4.91678291, 5.06376305, 5.20188764, 5.33056399,
5.44923995, 5.55740628, 5.65459886, 5.74040062, 5.81444339,
5.87640946, 5.92603293, 5.96310087, 5.98745423, 5.99898849,
5.99765418, 5.98345701, 5.95645791, 5.91677272, 5.86457174,
5.80007895, 5.7235711 , 5.63537648, 5.53587353, 5.42548921]
while not rospy.is_shutdown():
cartesian_to_path(x,y)
r.sleep()
add a comment
