
Reading data from the shifted laser, as if it was in the middle

I have algorithms that use raw data from laser [-pi/2;pi/2]. Earlier, the laser was in the middle of the robot. Now it has been moved closer to the left front edge and rotated by pi/4.
What is the best way to transform data from a shifted laser so that it would be visible like the laser was in the middle? I suppose, I have to use tf, but I don't know how exactly.
I'm using ROS Kinetic.
EDIT.
One of the algorithm are used raw data from laser (LaserScan/ranges) for simple avoiding obstacles, that react different depending on the occupied area. I have one treshold that qualifies thing as an obstacle in area and return if its free or not. Very similar to this image:
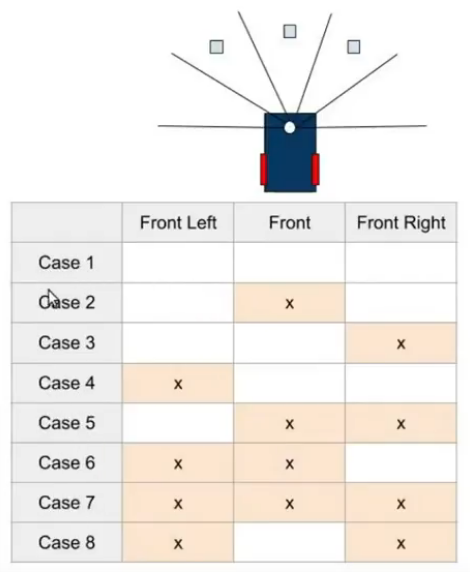
And now the laser is shifted, and I want to use my old algorithm to work, as if it was in the middle. Know I'm using the law of cosines to change the tresholds, but maybe there is a way, to "just" tranform the data from laser.


You are correct that TF is the way to do this, however you will need to tell us more about your application before we can help you. What are you using to process the laser data and what is it being used for?
I've added some description.