
Subscriber to array type overwriting data from different publishers!
Hi,
I have been witnessing some bizarre behaviour with my very simple node.
I have a custom message that contains uint8[] type (it's 8 elements long). I have a subscriber that subscribes to a topic of the custom message and stores it in a global variable:
uint16* leddar_distance_cm_1 = NULL;
void leddarCallback(const perception_msgs::Leddar8::ConstPtr& msg) {
if (msg->leddar_id == 1) {
leddar_distance_cm_1 = const_cast<uint16_t*>(&(msg->distance[0]));
}
for (uint8_t i = 0; i < 8; i++) {
ROS_INFO("VALUE: [%d]", leddar_distance_cm_1[i]);
}
}
int main(int argc, char** argv) {
ros::init(argc, argv, "collision_avoidance_node");
ros::NodeHandle n;
ros::Subscriber leddar_sub = n.subscribe("perception/leddars", 1000, leddarCallback);
ros::spin();
return 0;
}
I then have 2 publishers publishing onto that topic using rostopic pub. When I try to print the stored array from the callback I get this (bottom right window):
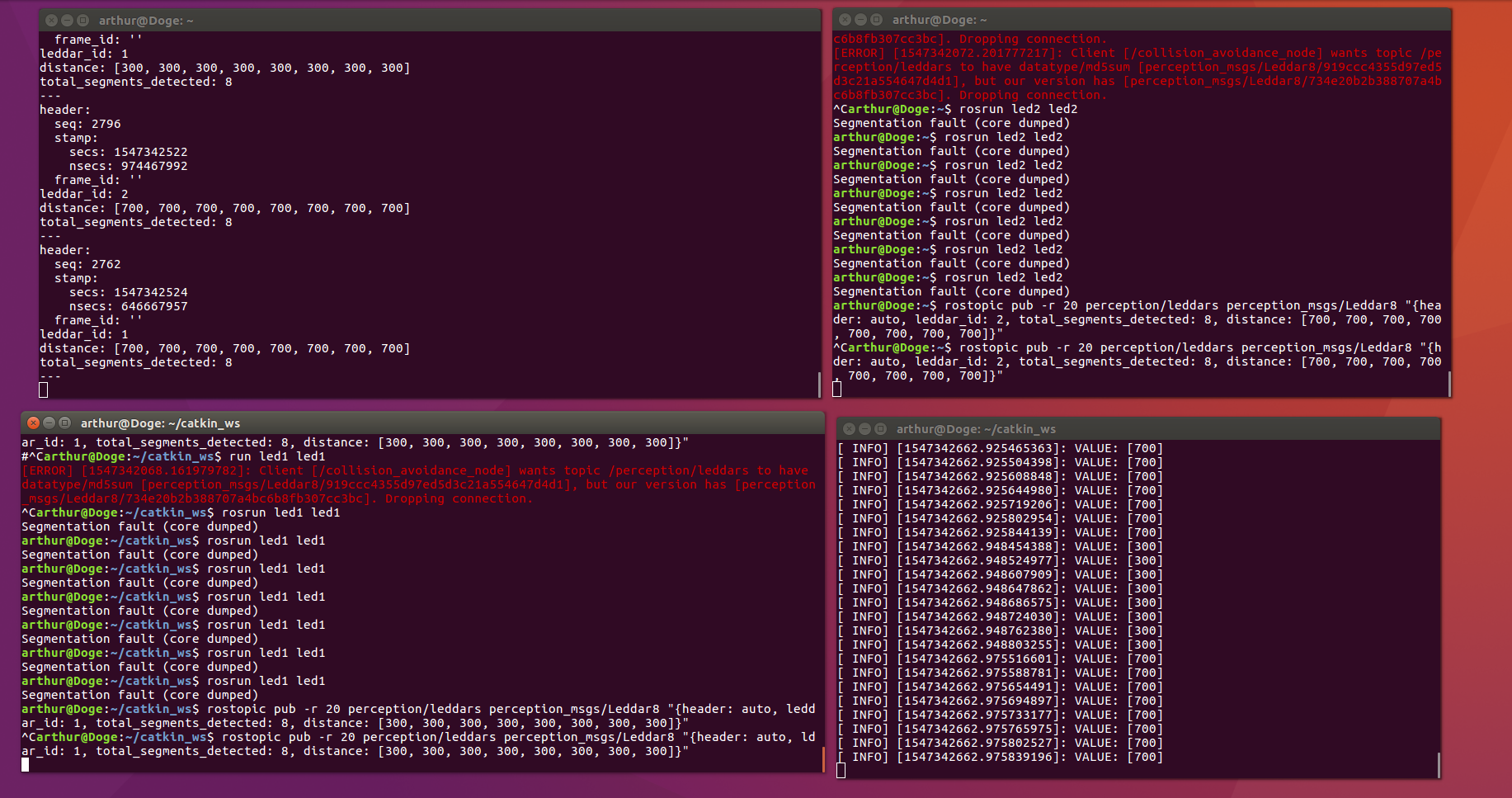
As you can see the two publishers seem to be interfering with each other and somehow overwritting leddar_distance_cm_1 pointer repeatedly. This doesn't happen with any non-pointer types from the message such as char or int.
I even tried creating 2 different subscribers for each publisher, same issue! As if both publishers are overwriting the same memory address (which they in fact are). Does this have anything to do with queues? I have a feeling that I am not reading the array correctly. I have spent over 8 hours looking at this and I can't figure out what the problem is, if there is an obvious mistake could someone please tell me what it is?

