
How can I use odometry + AMCL?
The first issue I have is that I hardcode the initial odometry position at the very beginning to be at 0,0. Code is very simple and typical:
int main(int argc, char** argv){
ros::init(argc, argv, "odometry_publisher");
ros::NodeHandle n;
ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 10);
tf2_ros::TransformBroadcaster odom_broadcaster;
// API
double x = 1.0;
double y = 6.0;
double th = 0.0;
double vx = 0.0;
double vy = 0.0;
double vth = 0.0;
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
// Variables
geometry_msgs::TransformStamped odom_trans;
tf2::Quaternion q;
nav_msgs::Odometry odom;
ros::Rate r(50.0);
while(n.ok()){
ros::spinOnce();
current_time = ros::Time::now();
double dt = (current_time-last_time).toSec();
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
th += delta_th;
// Setting the transform stamped messages:
q.setRPY(0,0,th);
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_footprint";
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation.x = q.x();
odom_trans.transform.rotation.y = q.y();
odom_trans.transform.rotation.z = q.z();
odom_trans.transform.rotation.w = q.w();
// Send the transform:
odom_broadcaster.sendTransform(odom_trans);
// Send the odometry messages to ROS:
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
// Here, take the positions from the wheelme backend whenever it reaches and send it to ros:
// Replace the xyz values by path values in for loop
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation.x = q.x();
odom.pose.pose.orientation.x = q.y();
odom.pose.pose.orientation.x = q.z();
odom.pose.pose.orientation.x = q.w();
// This values will be always zero until wheelme will start publishing its velocities:
odom.child_frame_id = "base_link";
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
// Now publish all that to odom topic:
odom_pub.publish(odom);
last_time = current_time;
r.sleep();
}
}
After that, I try to initialize the AMCL using my Lidar and I can see that the position of the robot jumps between the harcoded inital odom values and predicted AMCL values.
How can I combine them both? So that the AMCL corrects the position of the robot and odometry frame accepts that change?
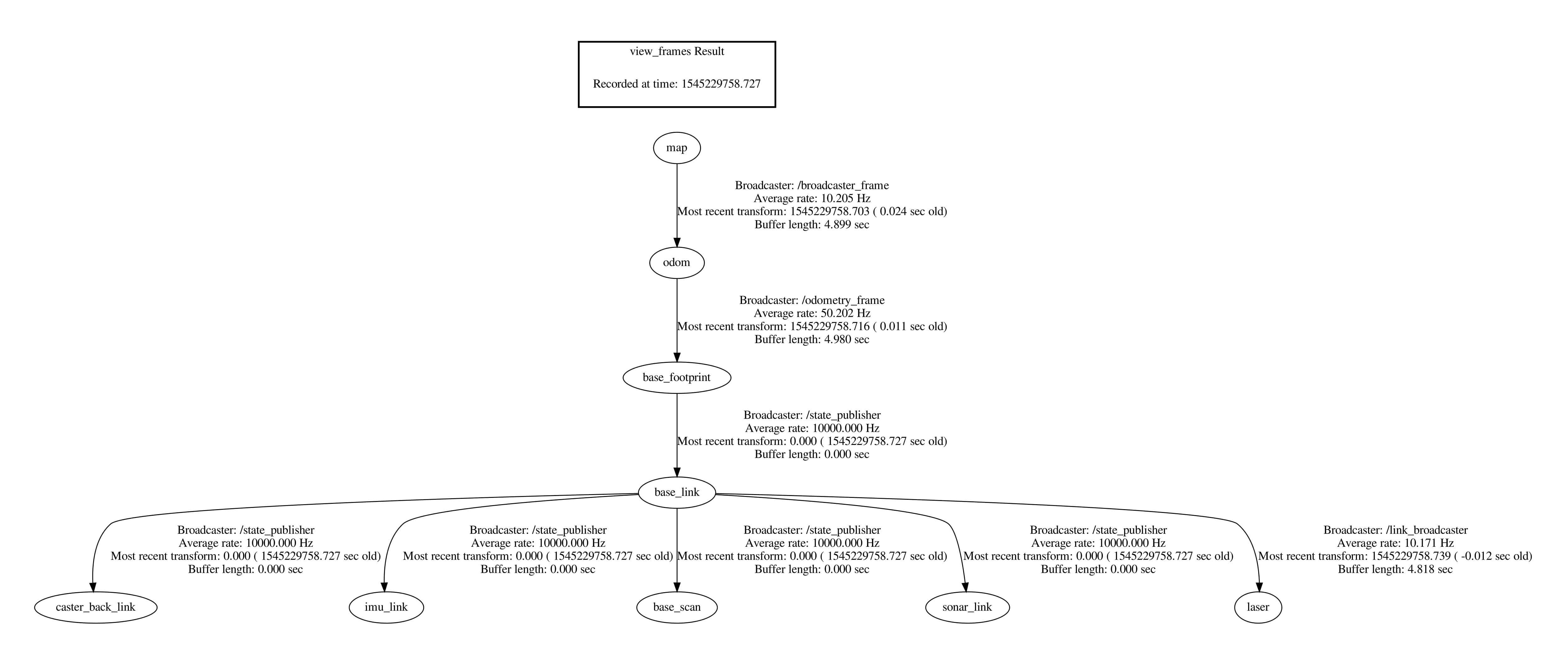
EDIT: adding a tf tree
add a comment
