
ROS & MatlabSimulink vs LIDAR
Hello,
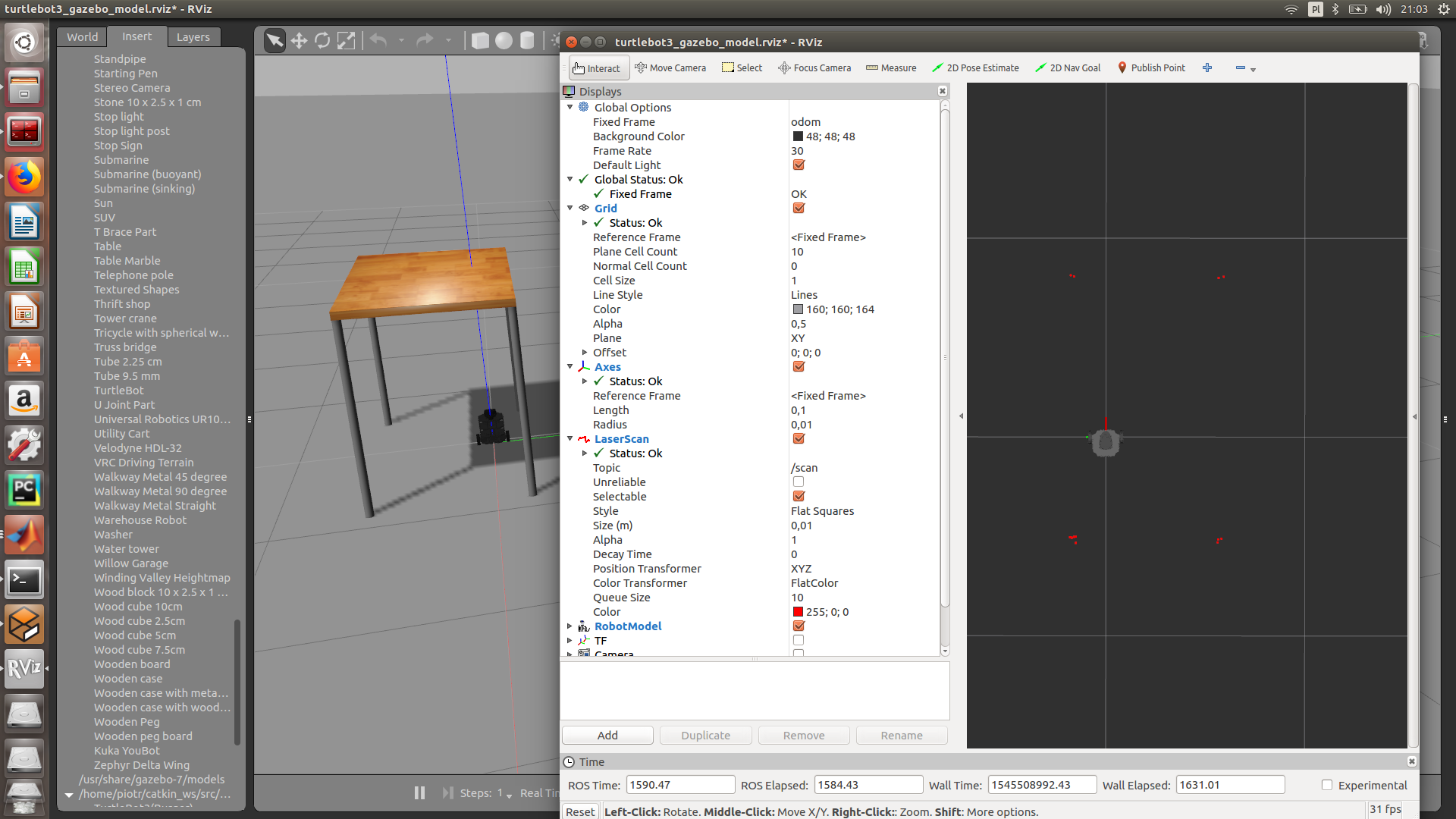
I am getting acquainted with the operation of the ROS environment and I was very interested in the project called turtlebot3. It allows me to simulate a robot with a lidar sensor and visualizations of this process in RVIZ. I would now like to download information about the lidar readings in order to develop a robot positioning algorithm between the table legs in the matlab.
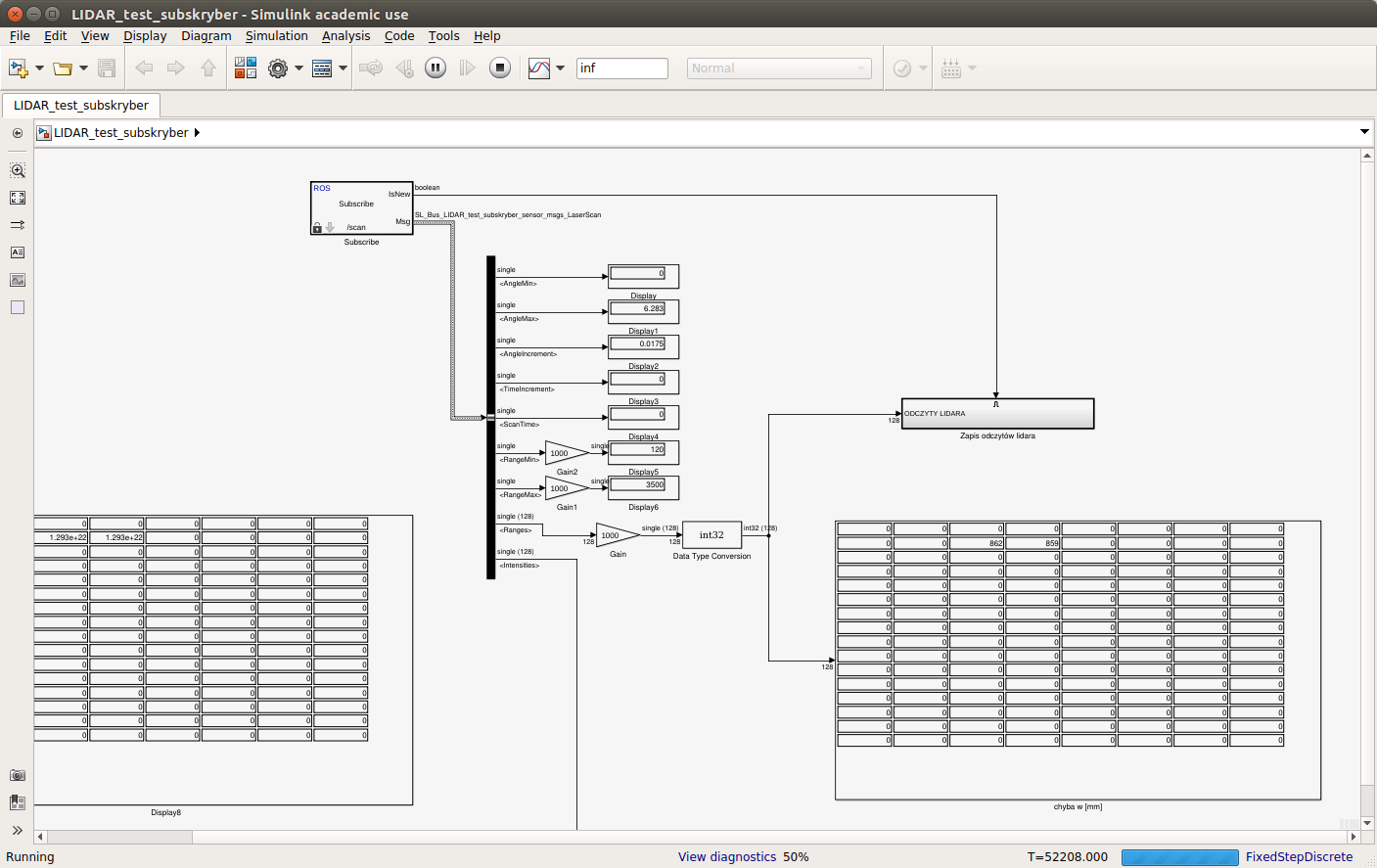
Unfortunately, despite the fact that the message / scan contains 360 items, Matlab allows reading only 128 items, which limits the reading angle of lidar to 128 degrees.
How can you fix it? I attach the screenshots in links:
Greetings, Piotr
Update
We have 360 readings in the rostopic echo. You can see four places where the readings are different from zero / inf. The readings match because the robot is between the table legs. Unfortunately, Matlab limits the angle to 128 readings, which means that only one leg of the table is visible.
Besides the simple model in simulink, I do not use any matlab functions (only rosinite).

{kind=link}
Could you please attach your images directly to the post? I've given you sufficient karma for that.
Done. Thank you.
@Piotr I've edited your question so that the images show up directly without having to follow a link, except for the screen shot of the text. Can you please update your question with a copy & paste of the text instead of an image?
Now is ok? ;)
I've just had a look at the rostopic echo output, and that scan contains just under 200 samples not 360. Can you show us the matlab code you're using because we won't be able to help you otherwise.
The post has been updated
Hello, Did you find a solution for this? I am facing the same issue
Hi,
the answer is: Tools -> Robot Operating System -> Manage Array Sizes
you need to change the value from 128 to 360