How to add octomap.bt file as a collision object in MoveIt using Python
Hello all,
I am quite new to octomaps. Working on Ubuntu 16.04 and ROS kinetic.
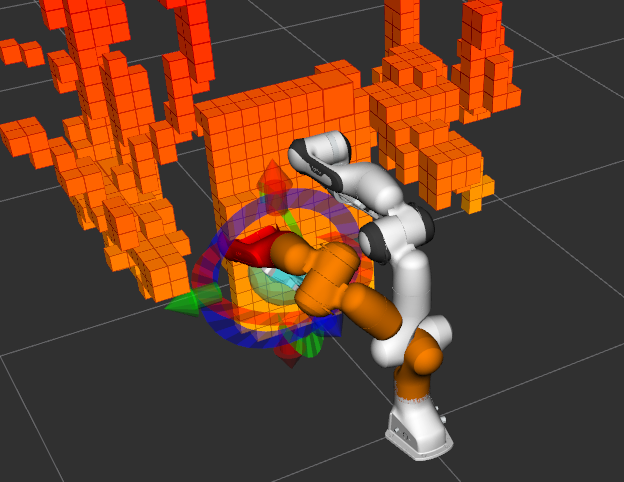
I am using the octomap_server package and have generated an octomap.bt file from a real scene obtained from kinect. I am able to visualize the octomap.bt file in Rviz when I run rosrun octomap_server octomap_server_node octomap.bt. I am trying to do obstacle avoidance using MoveIt planners for the franka emika's panda robot for which I run roslaunch panda_moveit_config demo.launch. I have checked the frame_ids and it's all correct. But the panda robot doesnt recognize octomap.bt file as collision objects. See pic. Also I followed the tutorial on MoveIt planning perception and added the parameters as mentioned.
I am using Python and not very familiar with C++. Can anyone suggest some way to add the octomap.bt file to planning scene in MoveIt and make it a collision object?
Thanks in advance
edit1: 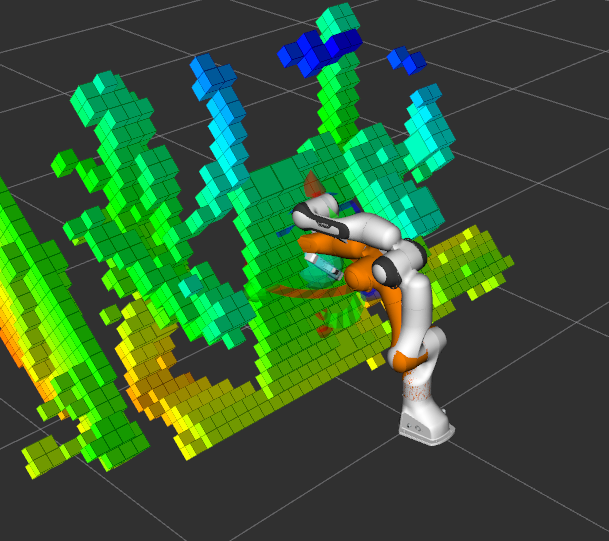
edit 2: Temporary Workaround
rosbag record /ceiling_camera/qhd/points --output-name=ceiling_cam_qhd_points# /ceiling_camera/qhd/points is my pointCloud topic in the file sensors_kinect_pointcloud.yaml as per instructions herepython pointcloud_as_obstacle.py# saves the time filtered pointCloud2 into ceiling_camera_qhd_points_filtered.bagrosbag play -l --clock ceiling_camera_qhd_points_filtered.bagroslaunch panda_moveit_config demo_promp.launch
The python file and the launch file can be found here