
Transform error: Could not find a connection between 'map' and 'arm1'
I am trying to run RViz, then I receive the error,
Transform error: Could not find a connection between 'map' and 'arm1' because they are not part of the same tree.Tf has two or more unconnected trees.
I am publishing point clouds from LSD_SLAM to RViz to visualize a map.
I checked for, rosrun tf view_frames
and my tf looks like this,

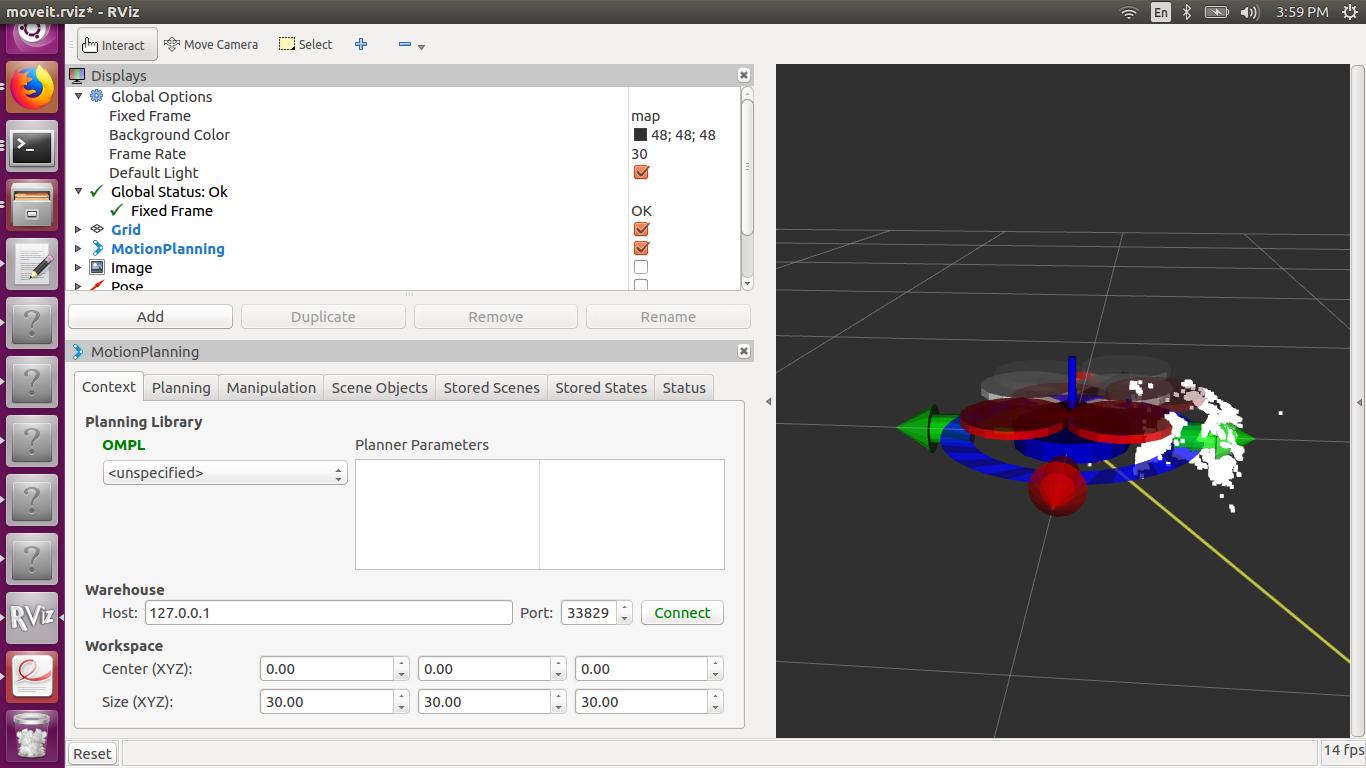
And I don't visualize the point cloud properly in RViz but just as a group of white clouds.
what could be the reason for this?

well, that certainly looks like you have two disconnected trees there: one with
shadowas the root, and one withardrone_base_link.You should probably fix that.