
Problem using gmapping slam MessageFilter[target=odom]
Hi everyone, I'm currently building my own robot, and I want to implement a slam algorithm. Whenever I try to run gmapping, I get this error:
[ WARN] [1543086745.282958810]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
The debug logger just says that all messages are dropper. I know that it's a problem of message synchronization, or a problem in the TF tree but I didn't managed to find the error. I have a lidar broadcasting scan data linked to /laser_frame , I compute the odometry data by integrating the wheel's encoder values, and publish it in a /odom topic and through a tf broadcaster. To make it work I've added two static transform to my launch file.
Here is the detail of the gmapping node :
user@user-G551JM:~$ rosnode info /slam_gmapping
--------------------------------------------------------------------------------
Node [/slam_gmapping]
Publications:
* /map [nav_msgs/OccupancyGrid]
* /map_metadata [nav_msgs/MapMetaData]
* /rosout [rosgraph_msgs/Log]
* /slam_gmapping/entropy [std_msgs/Float64]
* /tf [tf2_msgs/TFMessage]
Subscriptions:
* /scan [sensor_msgs/LaserScan]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Services:
* /dynamic_map
* /slam_gmapping/get_loggers
* /slam_gmapping/set_logger_level
contacting node http://10.42.0.224:33867/ ...
Pid: 4043
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /tf
* to: /slam_gmapping
* direction: outbound
* transport: INTRAPROCESS
* topic: /tf
* to: /tf2_web_republisher
* direction: outbound
* transport: TCPROS
* topic: /map
* to: /rviz
* direction: outbound
* transport: TCPROS
* topic: /tf
* to: /slam_gmapping (http://10.42.0.224:33867/)
* direction: inbound
* transport: INTRAPROCESS
* topic: /tf
* to: /robot_state_publisher (http://ubiquityrobot.local:38101/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /base_link_to_laser4 (http://ubiquityrobot.local:44841/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /odometry_computation (http://10.42.0.224:40363/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /odom_to_base_link (http://10.42.0.224:46723/)
* direction: inbound
* transport: TCPROS
* topic: /tf_static
* to: /robot_state_publisher (http://ubiquityrobot.local:38101/)
* direction: inbound
* transport: TCPROS
* topic: /scan
* to: /ydlidar_node (http://ubiquityrobot.local:37987/)
* direction: inbound
* transport: TCPROS
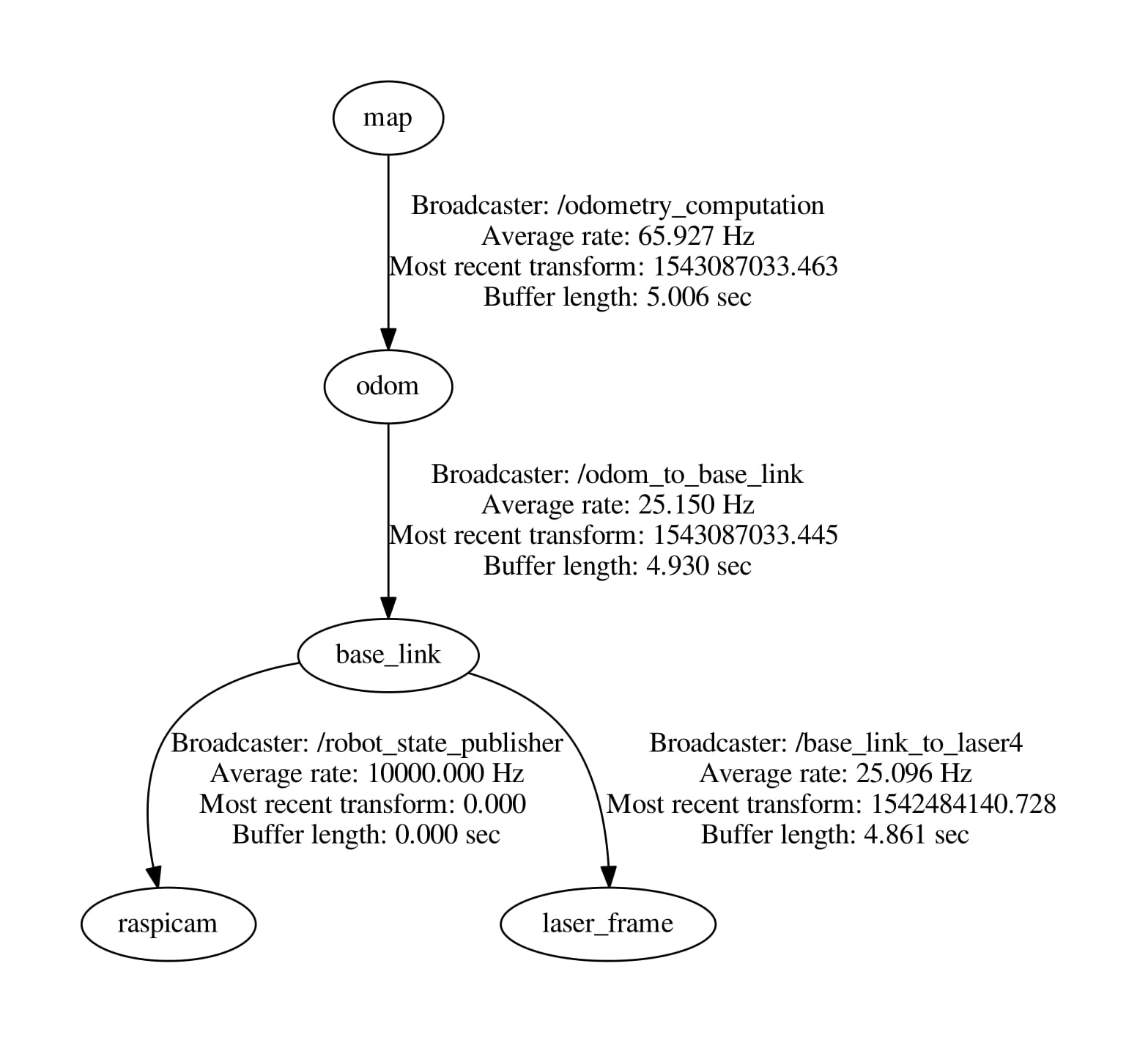
I don't understand the purpose of the /tf_static topic , maybe it plays a role in this. Here is my tf tree, the raspicam is included by default on the ubiquity robot image I use on my raspberry pi.
Thank you for your help !

{kind=link}
I have been facing the same issue for a while now and couldnt find anything. If you found a solution to this, please share.