Hi,
I think the first steps to know how to publish images in ROS is through rostopics of type sensor_msgs/Image.
A very good example is how the gazebo_ros_camera plugin does it.
Check the git of how this is implemented to have a good example on how to publish camera info in ROS : camera plugin
You then have to check if its working. Here are several options, each one more complete:
1) rostopic hz /camera_topic_name: This is the simplest. It states if its publishing and at what rate. Good to know if its alive at least
2) rostopic echo /camera_topic: To gete a stream of data. Not very practical with big image files
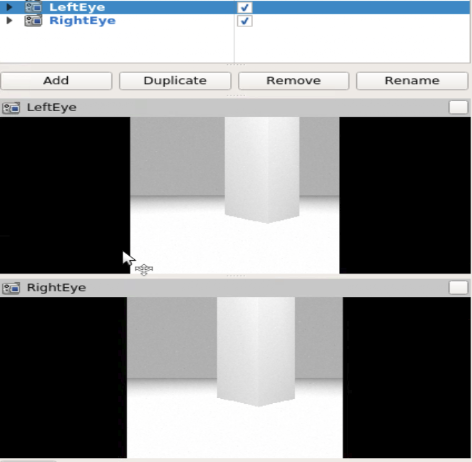
3) RVIZ: add an image element. It will show you the images registered by your camera.
4) RVIZ: add a camera element. This element is the best because it needs TFs to be published correctly, which is vital for working with cameras in ROS.
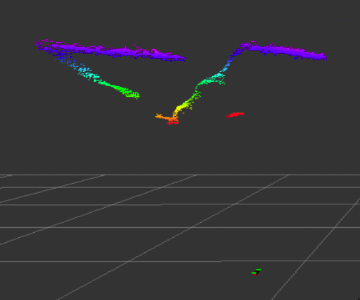
5) You can use the stereo_image_proc to see if your stereo cam can be used for stereo vision point cloud generation. This is the final test, if it works, you are ready to go.
I also created a small video tutorial that explains all this in a demo VIDEO
Here is the code for the practical example GIT
And here the ROSject , which you can use plug and play.
Hope it helped.


This really depends what type of stereo camera you're using. Can you give us a bit more information about your setup.
usb stereo camera that I was using , and I try to launch it by usb_cam driver but failed. it seems that usb_cam driver only designed to drive monocular cam? so How to publish left and right images of my stereo usb cam?@PeteBlackerThe3rd
can you tell us your camera name?
ksia-528