
geotiff trajectory
Hey guys
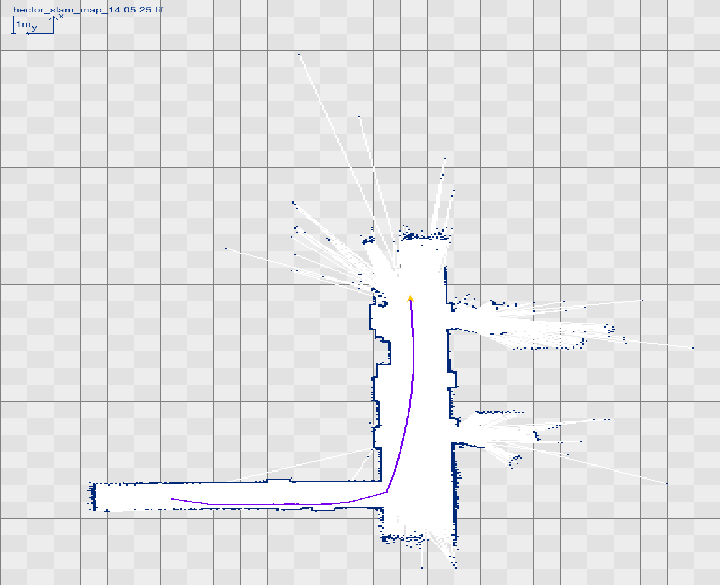
I've made a ground robot running hector slam on ROS Kinetic. I've got the hector saving geotiff files to be sent to a remote desktop. The mapping is working fine but the robot's trajectory is staying at the original position, strangely the path is drawing with the map fine as seen below (my robot doesn't like driving straight). I CAN see the the trajectory in Rviz.
When i execute
rosservice call trajectory
I get the error message "ERROR: Unable to load type [hector_nav_msgs/GetRobotTrajectory]. Have you typed 'make' in [hector_nav_msgs]?"
geotiff_mapper.launch
<?xml version="1.0"?>
<launch>
<arg name="trajectory_source_frame_name" default="/base_link"/>
<arg name="trajectory_update_rate" default="4"/>
<arg name="trajectory_publish_rate" default="0.25"/>
<arg name="map_file_path" default="(find hector_geotiff)/maps"/>
<arg name="map_file_base_name" default="hector_slam_map"/>
<node pkg="hector_trajectory_server" type="hector_trajectory_server" name="hector_trajectory_server" output="screen">
<param name="target_frame_name" type="string" value="/map" />
<param name="source_frame_name" type="string" value="$(arg trajectory_source_frame_name)" />
<param name="trajectory_update_rate" type="double" value="$(arg trajectory_update_rate)" />
<param name="trajectory_publish_rate" type="double" value="$(arg trajectory_publish_rate)" />
</node>
<node pkg="hector_geotiff" type="geotiff_node" name="hector_geotiff_node" output="screen" launch-prefix="nice -n 15">
<remap from="map" to="/dynamic_map" />
<param name="map_file_path" type="string" value="$(arg map_file_path)" />
<param name="map_file_base_name" type="string" value="$(arg map_file_base_name)" />
<param name="geotiff_save_period" type="double" value="1" />
<param name="draw_background_checkerboard" type="bool" value="true" />
<param name="draw_free_space_grid" type="bool" value="false" />
<param name="plugins" type="string" value="hector_geotiff_plugins/TrajectoryMapWriter" />
</node>
</launch>
Any ideas what may be wrong? Thanks for your time.
add a comment

