Hi. I have solved this problem with two possible methods. One is by using pointcloud2 and the second is by using visualizer msgs : marker. Images below show my desired goal and solutions obtained by using pointcloud2 and marker.
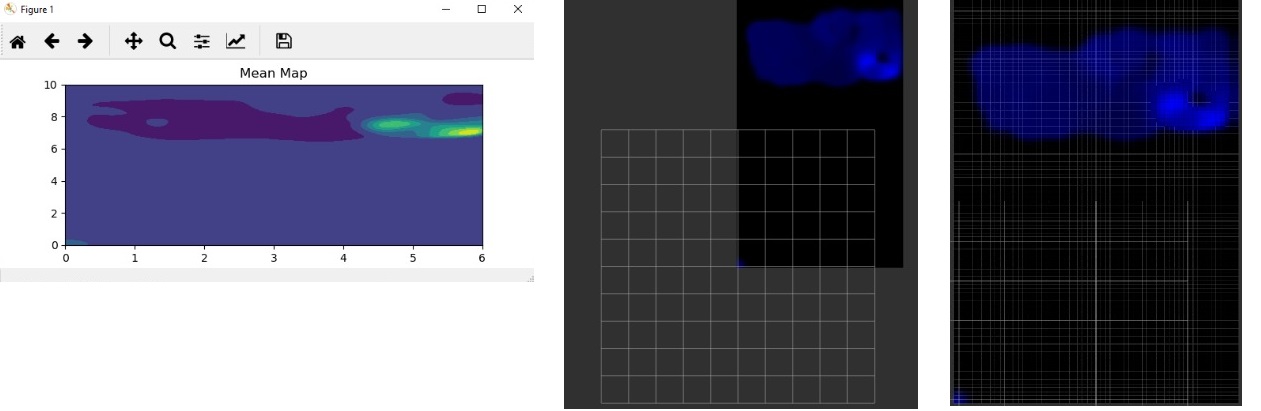 The left image is generated by using matplotlib while the center is by using PointCloud2 and right is by using marker. There is not obvious different between PointCloud2 and Marker from the aspect of display. I cant generate the exact similar image as matplotlib (the yellow region) due to my lack of knowledge. Recommendation and suggestion on how to achieve that is very welcome. Back to the topic. Although PC2 and marker version does not have the yellowish region as matplotlib, however it has slightly lighter region at the similar location is satisfy for me. I have attached part of my codes for PC2 and Marker at here as references for beginner like me.
The left image is generated by using matplotlib while the center is by using PointCloud2 and right is by using marker. There is not obvious different between PointCloud2 and Marker from the aspect of display. I cant generate the exact similar image as matplotlib (the yellow region) due to my lack of knowledge. Recommendation and suggestion on how to achieve that is very welcome. Back to the topic. Although PC2 and marker version does not have the yellowish region as matplotlib, however it has slightly lighter region at the similar location is satisfy for me. I have attached part of my codes for PC2 and Marker at here as references for beginner like me.
For PointCloud2 :
# PointCloud2 is working
# PointCloud2 : The following part is to gdm_data X, Y and mean/var
gdm_X = X.flatten()
gdm_Y = Y.flatten()
gdm_Z = numpy.zeros_like(gdm_X)
gdm_Mean = mean_map.flatten()
gdm_data = numpy.column_stack((gdm_X,gdm_Y,gdm_Z,gdm_Mean))
# PointCloud2 : The following algo is for visualize pointcloud2
header = std_msgs.msg.Header()
header.stamp = rospy.Time.now()
header.frame_id = 'map'
field=[PointField(name='x', offset=0, datatype=PointField.FLOAT32, count=1),PointField(name='y', offset=4, datatype=PointField.FLOAT32, count=1),PointField(name='z', offset=8, datatype=PointField.FLOAT32, count=1),PointField(name='rgb', offset=12, datatype=PointField.UINT32, count=1)]
gdm_data = pcl2.create_cloud(header, field, gdm_data)
pc2_Testing.publish(gdm_data)
For Marker :
# MarkerArray is Working
gdm_X = X.flatten()
gdm_Y = Y.flatten()
gdm_Z = numpy.zeros_like(gdm_X)
gdm_Mean = mean_map.flatten()
gdm_Mean = numpy.interp(gdm_Mean,[min(gdm_Mean),max(gdm_Mean)],[0.0,1.0])
gdm_data = numpy.column_stack((gdm_X,gdm_Y,gdm_Z,gdm_Mean))
triplePoints = []
colorsGroup = []
markerArray = MarkerArray()
for (x,y,z,a) in gdm_data:
p = Point()
p.x = x
p.y = y
p.z = 0
marker = Marker()
marker.header.frame_id = "/map"
marker.type = marker.POINTS
marker.action = marker.ADD
marker.scale.x = 0.2
marker.scale.y = 0.2
marker.scale.z = 0.2
colorsGroup.append(ColorRGBA(0,0,a,1))
marker.pose.orientation.w = 1.0
t = rospy.Duration()
marker.lifetime = t
triplePoints.append(p)
marker.points = triplePoints
marker.colors = colorsGroup
markerArray.markers.append(marker)
marker_pub.publish(markerArray)


Hi, could I please ask you to attach your images directly to your question? I've given you sufficient karma for that.
Thanks.
@gvdhoorn, thank you so much for providing me with sufficient karma. May God bless your kindness.
No need to thank me. They're just imaginary internet points.
It is still a great help for a newbie. Thanks again. Hopefully, someone may lend me a hand on this topic ^_^
You might want to check the 2018 roscon talk "Unleashing the GIS Toolbox on Real-Time Robotics"