
Fusing GPS, IMU and odom data
Hi, I am trying to fuse the GPS and IMU data using robot_localization package. I have configured the nodes as mentioned here.
I am running
- one instance of
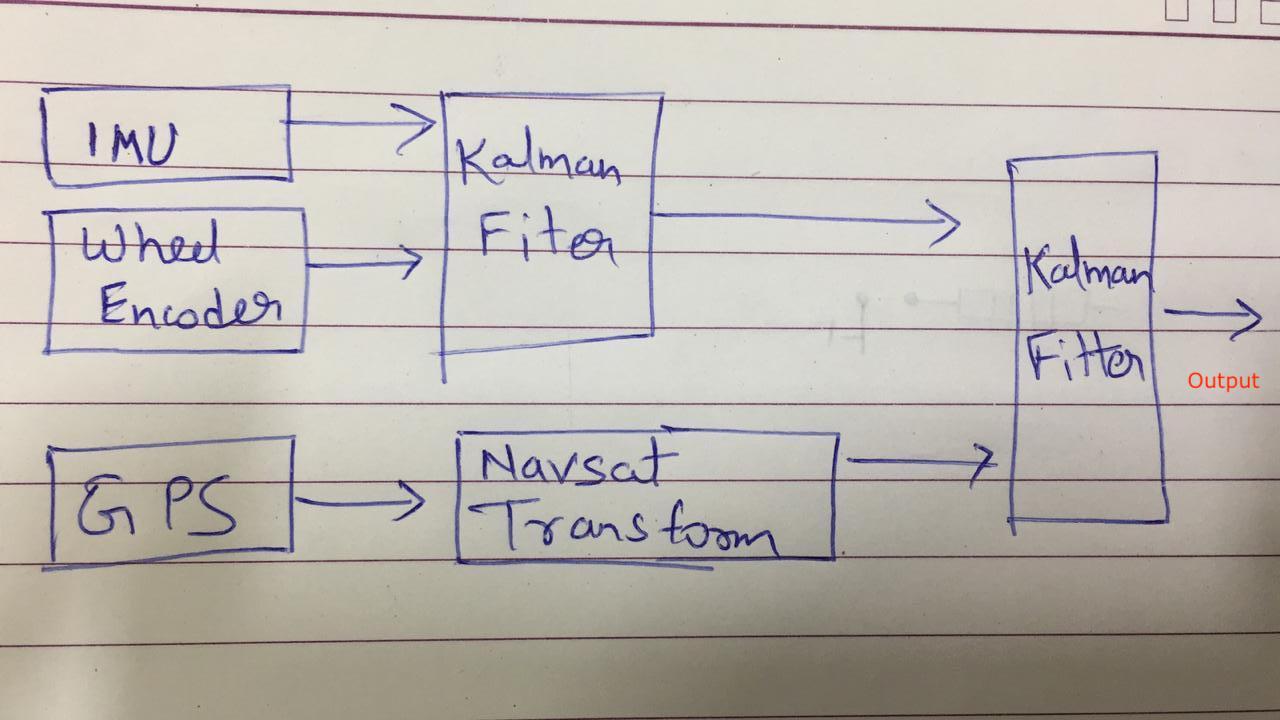
ekf_localization_nodewhich provides output on topic/odometry/filtered. - one instance for
navsat_transform_nodewhich takes input from these 3 topics -/odometry/filtered,/imu/dataand/fix.
Now at this point I should get the output on /odometry/gps but there is nothing published on this topic. I know that in order to fuse the GPS, IMU and odom data together I need to run one more instance of ekf_localization_node but since I am not getting any output from navsat_transform_node I haven't proceeded further.
For testing this out I am using the test1.bag provided with robot_localization package inside the test folder.
This is my launch file -
<launch>
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_1" clear_params="true">
<rosparam command="load" file="$(find robot_localization)/params/GPS_IMU.yaml" />
<!-- Placeholder for output topic remapping
<remap from="odometry/filtered" to=""/>
<remap from="accel/filtered" to=""/>
-->
</node>
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform" clear_params="true">
<rosparam command="load" file="$(find robot_localization)/params/navsat_transform_GPS_IMU.yaml" />
<!-- Placeholders for input remapping. Set your topic names as the "to" values.
<remap from="odometry/filtered" to="odometry/filtered_map"/> -->
<remap from="imu/data" to="/imu/data"/>
<remap from="gps/fix" to="/fix"/>
</node>
</launch>
Here is the YAML file -
frequency: 30
sensor_timeout: 0.1
two_d_mode: false
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: true
debug: false
debug_out_file: /path/to/debug/file.txt
publish_tf: true
publish_acceleration: false
map_frame: map # Defaults to "map" if unspecified
odom_frame: odom # Defaults to "odom" if unspecified
base_link_frame: base_link # Defaults to "base_link" if unspecified
world_frame: odom # Defaults to the value of odom_frame if unspecified
odom0: /husky_velocity_controller/odom
odom0_config: [true, true, false,
false, false, false,
false, false, false,
false, false, true,
false, false, false]
odom0_queue_size: 2
odom0_nodelay: false
odom0_differential: false
odom0_relative: false
odom0_pose_rejection_threshold: 5
odom0_twist_rejection_threshold: 1
imu0: /imu/data
imu0_config: [false, false, false,
true, true, true,
false, false, false,
true, true, true,
true, true, true]
imu0_nodelay: false
imu0_differential: false
imu0_relative: true
imu0_queue_size: 5
imu0_pose_rejection_threshold: 0.8 # Note the difference in parameter names
imu0_twist_rejection_threshold: 0.8 #
imu0_linear_acceleration_rejection_threshold: 0.8 #
imu0_remove_gravitational_acceleration: true
use_control: true
stamped_control: false
control_timeout: 0.2
control_config: [true, false, false, false, false, true]
acceleration_limits: [1.3, 0.0, 0.0, 0.0, 0.0, 3.4]
deceleration_limits: [1.3, 0.0, 0.0, 0.0, 0.0, 4.5]
acceleration_gains: [0.8, 0.0, 0.0, 0.0, 0.0, 0.9]
deceleration_gains: [1.0, 0.0, 0.0, 0.0, 0.0, 1.0]
process_noise_covariance: [0.05, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0.05, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.06, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.03, 0, 0, 0, 0 ...

Can you add images of the topics(rqt_graph) and transforms (rosrun tf view-frames) while bag file is playing?
Hi Billy, here are the images rqt_grapg, view_frames
I'm really not an expert but I think you need transforms between baselink and your odom, imu, and GPS. I don't see those.
The node actually throws error when it doesn't receive transform which is required. I don't see any error so I think I don't need any other transforms. I changed the frame id of the imu messages from "imu_link" to "base_link" and now data is getting published over /odometry/gps but its all 0.0