
Why map_saver is waiting for map (slam_gmapping)?
I was following this this tutorial in the hope of getting slam_gmapping working with kinect and nxt.
In the second step:
2) Get a bag. You have a couple of choices:
(i) Download an existing bag to test with ("basic_localization_stage.bag"), or
(ii)Create a bag with your robot ("differentfrequencybag.bag"-->created by myself using nxt_teleop)
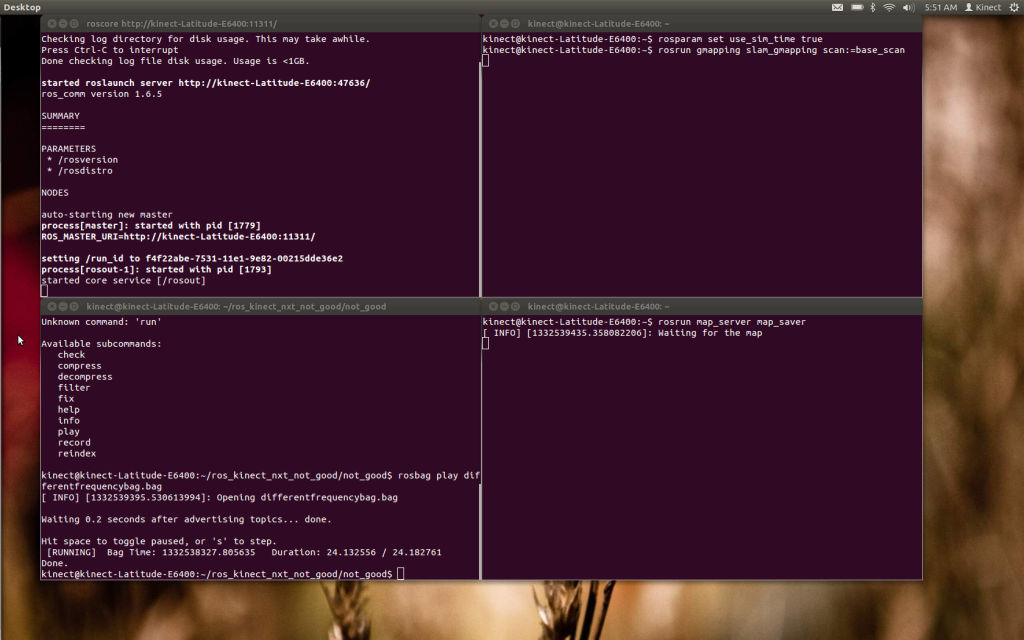
I have manage to get the map.pgm for the downlaoded "basic_localization_stage.bag" but not for the bag file I have created ("differentfrequencybag.bag"). By using the commands below:
1) roscore
2) rosparam set use_sim_time true
3) rosrun gmapping slam_gmapping scan:=base_scan
4) rosbag play "name of the bag that you downloaded / created in step 2"
5) rosrun map_server map_saver
*****Question: Do i need to have the EXACT same frequency for base_scan topic and tf topic?********
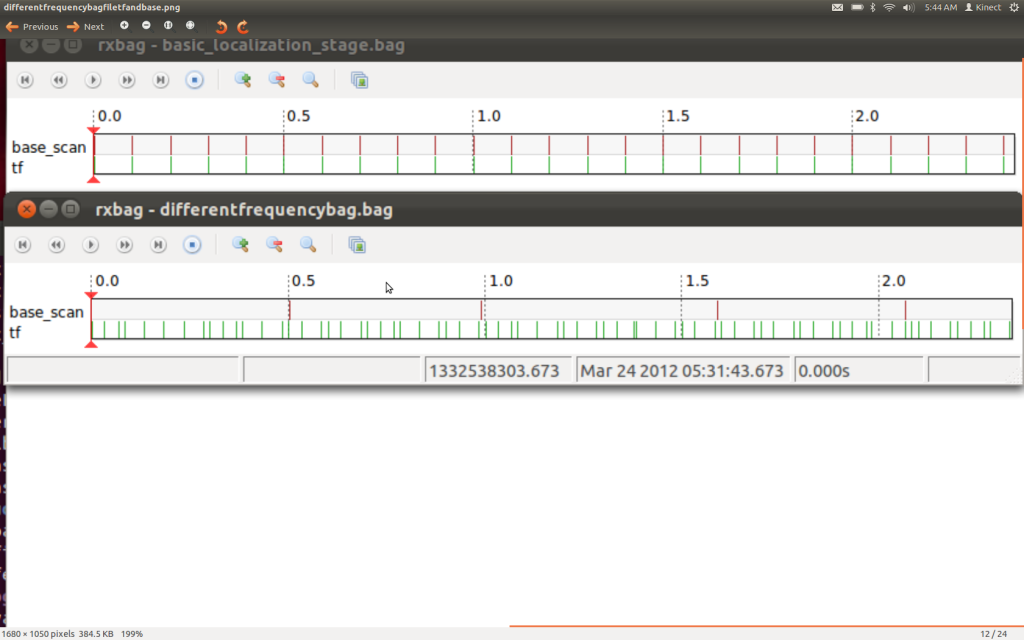
Since I have noticed that the downloaded .bag file has the same frequency for both topics (tf and base_scan):
base_scan | | | | | (align so nicely) tf | | | | | (align so nicely)
The one I have created is like:
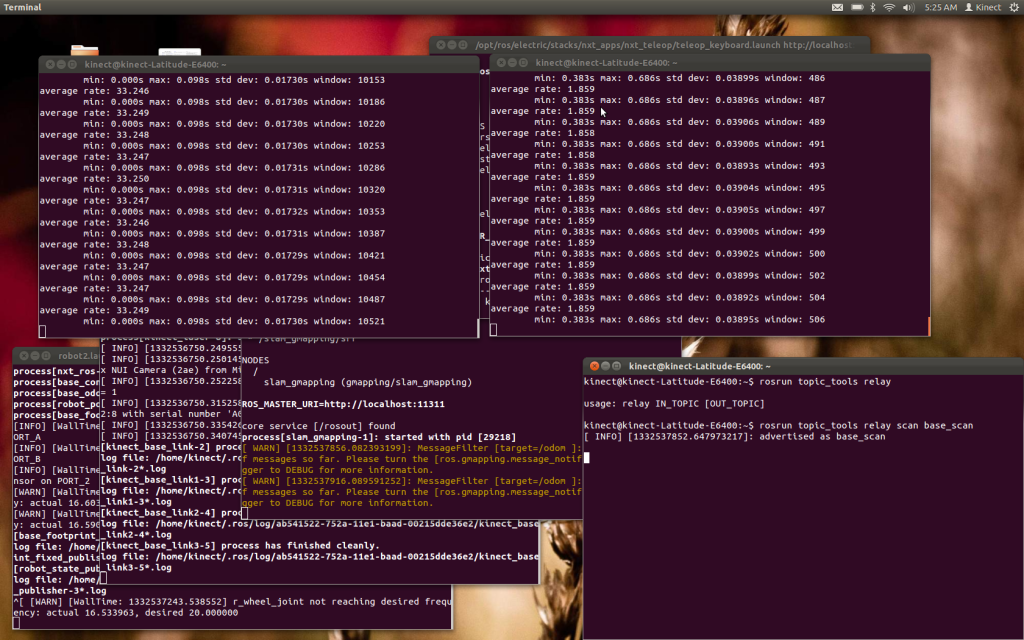
base_scan | (about 1.9Hz: on the right of the diagram below) tf | || | | (about 33.25Hz on the right of the diagram below)
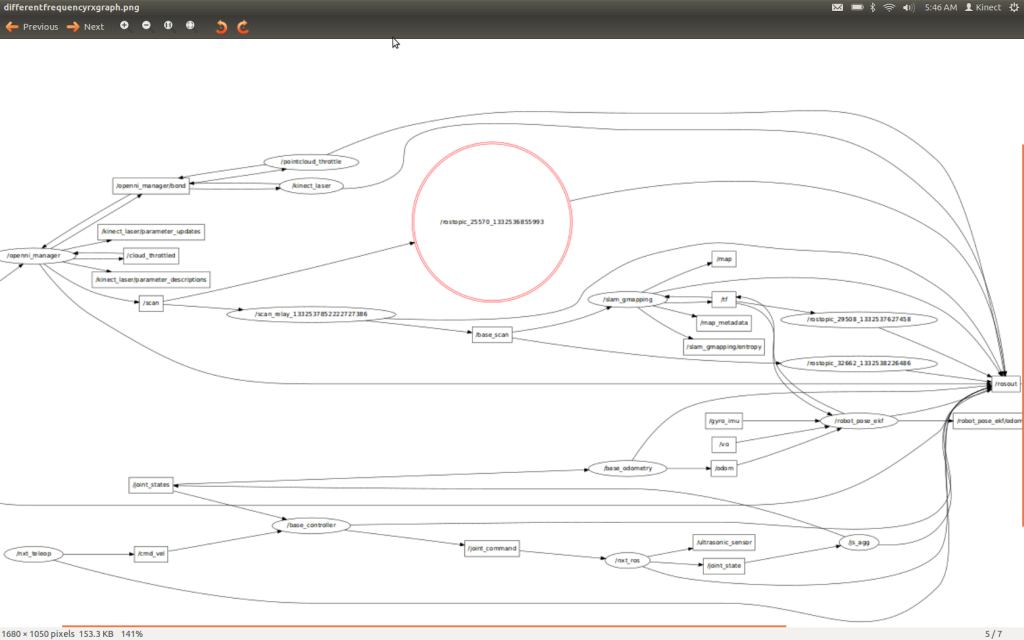
The rxgraph is shown below (The slam_gmapping node does have the tf and base_scan inputs):
I am still not sure why map_saver is waiting for the map(as shown in the diagram below). Hmm...
Question: Do i need to have the EXACT same frequency for base_scan topic and tf topic?*


can you post larger image of rxgraph?
And this is why images should be directly embedded into a question instead of using a hosting site...