
Costmap clearing of obstacles
I am having the same issues as this:
Blue points are obstacles marked
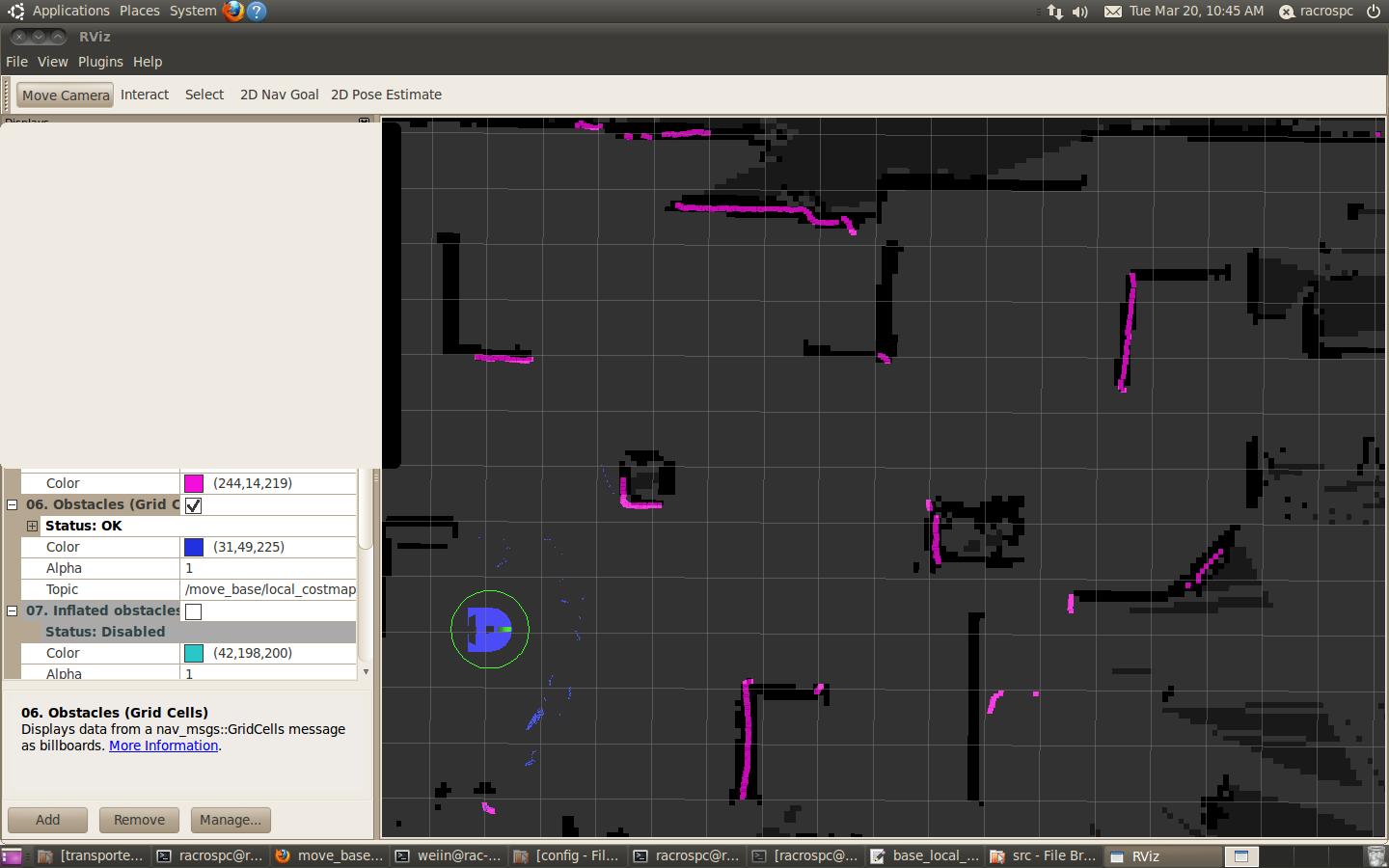
Pink are the laser scans
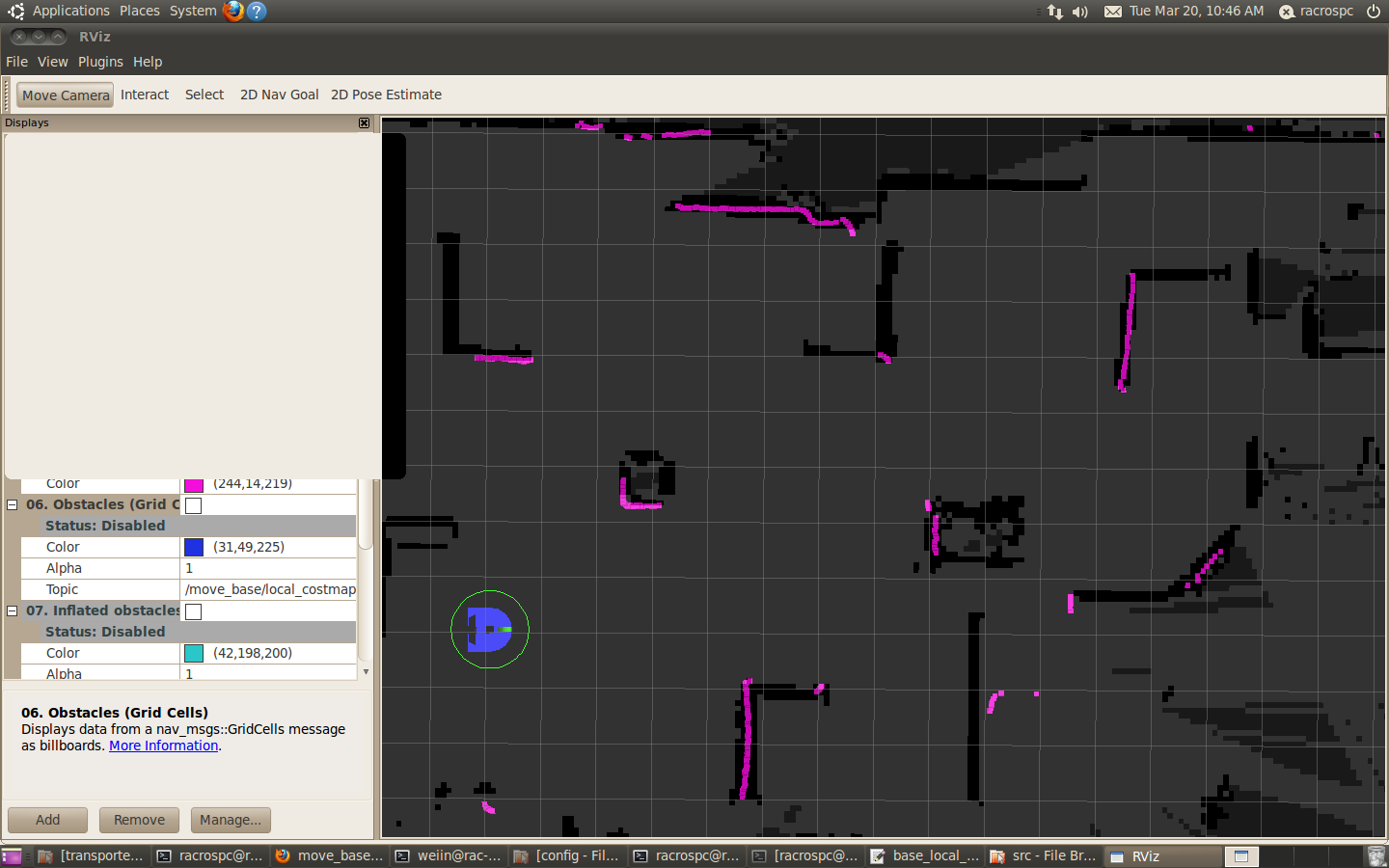
I am using Hokuyo UHG-08LX. What I still do not understand is, why are the obstacles not seen by the laser still left behind? This is so even after a few minutes (with robot not moving).
If the laser could see the obstacles before, there should be scans which would pass through these points after the obstacle is removed. Raytracing should have been able to clear those paths. Or am I missing something?
add a comment

