
Where does turtlebot3_core define odom and base_footprint names?
Hello! I am attempting to run slam gmapping for 2 robots. I am having a problem where the transform trees are conjoining instead of there being 2 separate trees. I have already included namespaces and tf_prefixes in all of the launch files. odom and base_footprint are both generated after launching turtlebot3_core, and I cannot for the life of me find where these names are defined. Where can I change the names of these generated tf nodes? Or is there another way I can manage this? 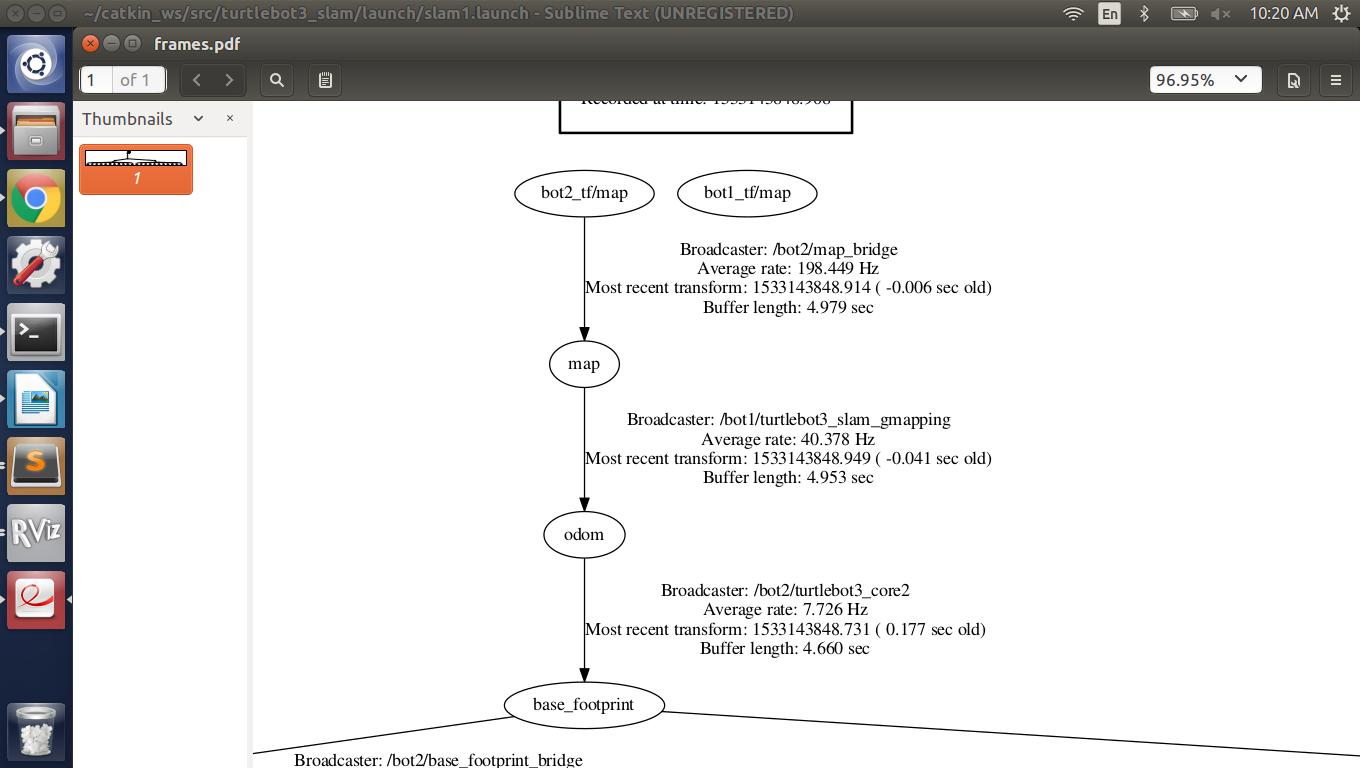
add a comment
