
Initial pose for robot_localization within a given map
Hi, I am able to run r_l package fuing wheel odometry, imu and gps. Now I want to run the localization within a predefined map.
As briefly mentioned here, I have to initialize a robot pose within a map before calling navsat_tranform.
I don't know how to do it. Let's say the robot starts within a map with an arbitrary pose, I wonder is there any way to set that pose before calling navsat_transform?
For example, my current localization result within a prior looks like this:
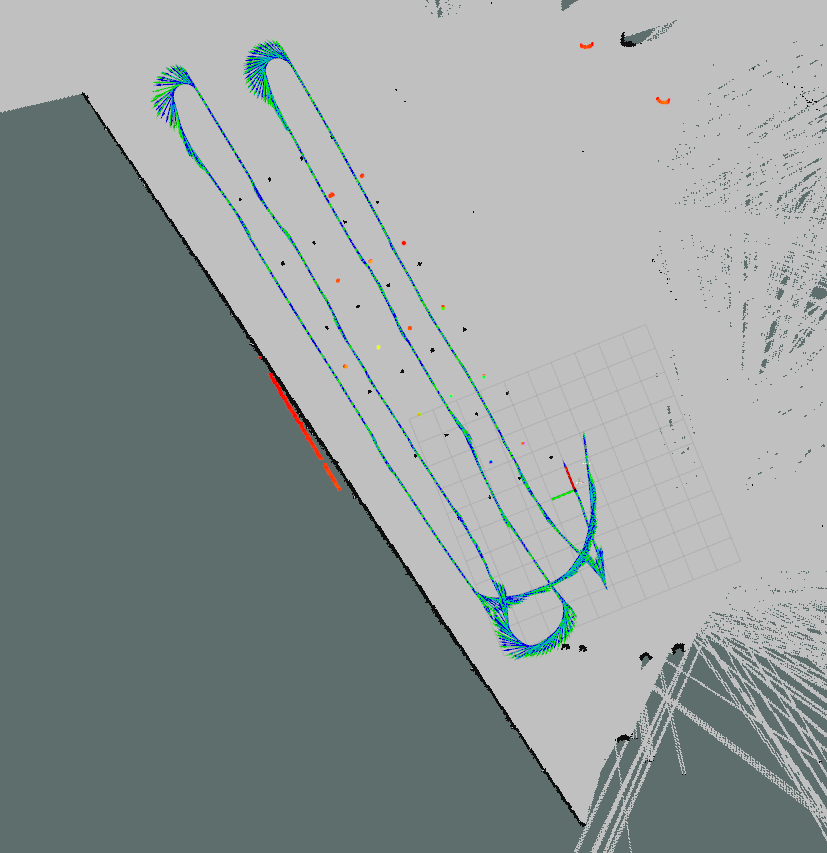
The blue arrows are fused odometry using wheel encoder, imu and gps. The localization result in world_frame is satisfying.
add a comment
