
Problem with husky_rviz, no tf data
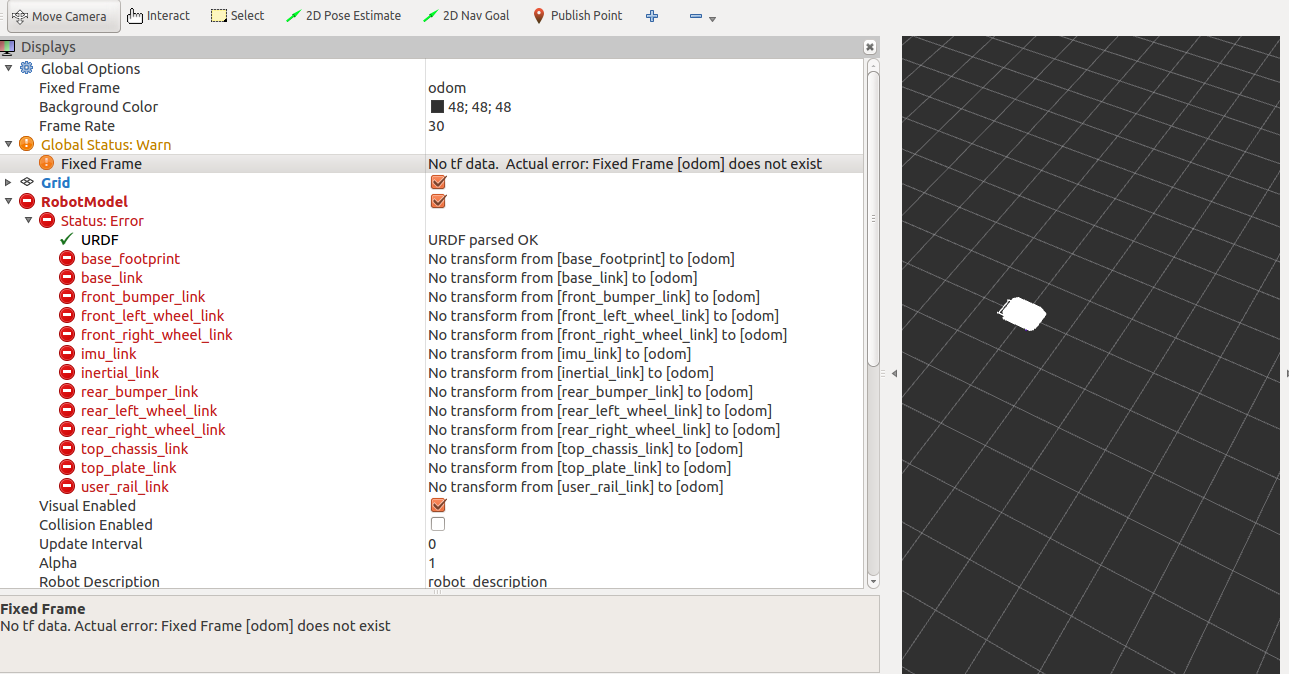
I am working with ubuntu 14.04 indigo. I followed this tutorial and ran the husky_gazebo launch file first then the husky_rviz launch file. However, I cannot see the husky model shown in the tutorial in rviz. In the display panel, it shows me a No tf data. Actual error: Fixed Frame [odom] does not exist in the global status. Also, the robotModel status is an error as well.
The only thing that I did differently then the tutorial is that I downloaded the all the gazebo models from this link, and moved all files to ~/.gazebo/models/ folder. Also, instead of running roscore, I am running sudo service husky-core start on the actually Husky robot.
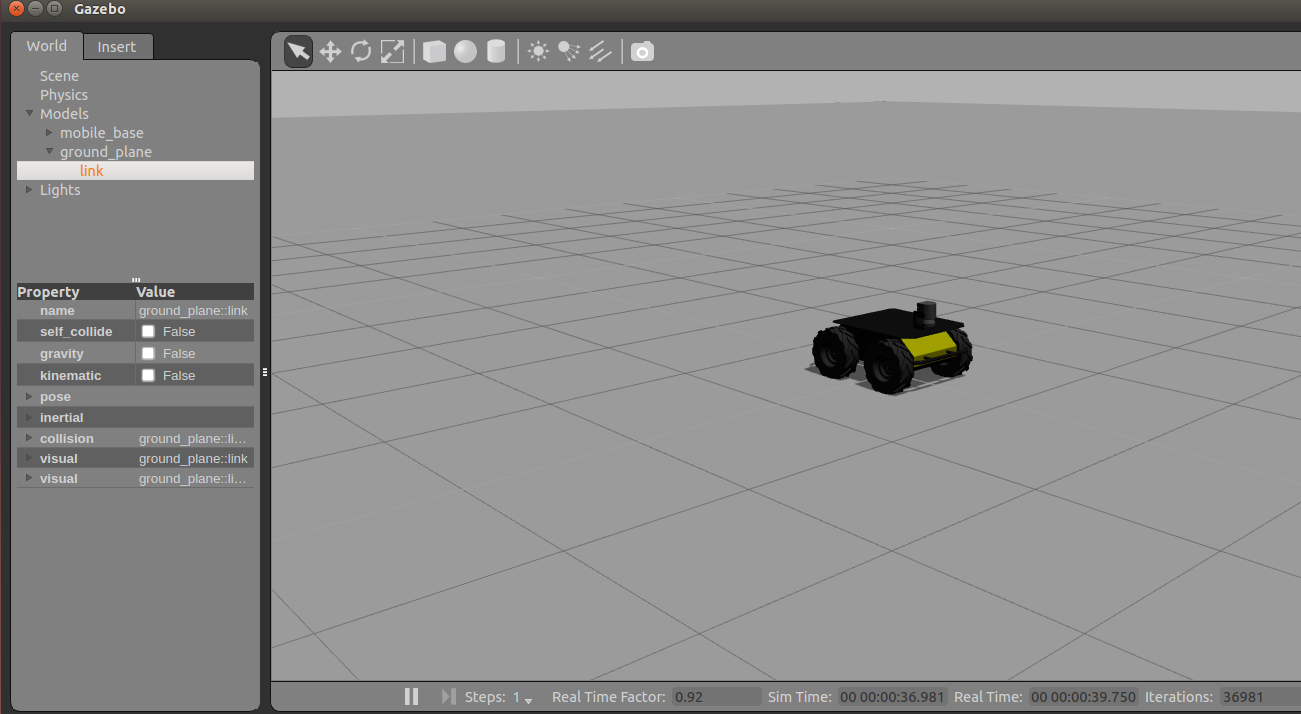
here is a screen shot of the gazebo view panel:
rviz view panel:
anyone have any suggestions on how to fix this?
tf tree:
update:
When I first turn on the husky robot and starts the husky-core, then roslaunch husky_viz view.robot.launch, everything works fine in rviz. When I move the joystick controller, the actually husky moves and the simulated husky in rviz moves as well. Now, I am trying to use gazebo to simulate the husky by roslaunch husky_gazebo husky_empty_world.launch, then roslaunch husky_viz view_robot.launch, but the husky model does not show up in rviz.

Can you post your tf tree?
I added it, but it just shows no tf data received.
husky_gazebo , when you launch this , see to it that all the nodes are launched properly . Sometimes if dependencies are not installed , usually stuff like this happens .
I checked with
rosdep check husky_gazeborosdep check husky_vizand it shows me that all the dependency are satisfied. Also, I downloaded those packets bysudo apt-get install