
nav2d_karto map rebuilds with wrong coords
Hey guys, i finally managed to start a turtlebot2 with a lidar laser sensor and the Operator, Mapper and Navigator from the nav2d_tutorial3.
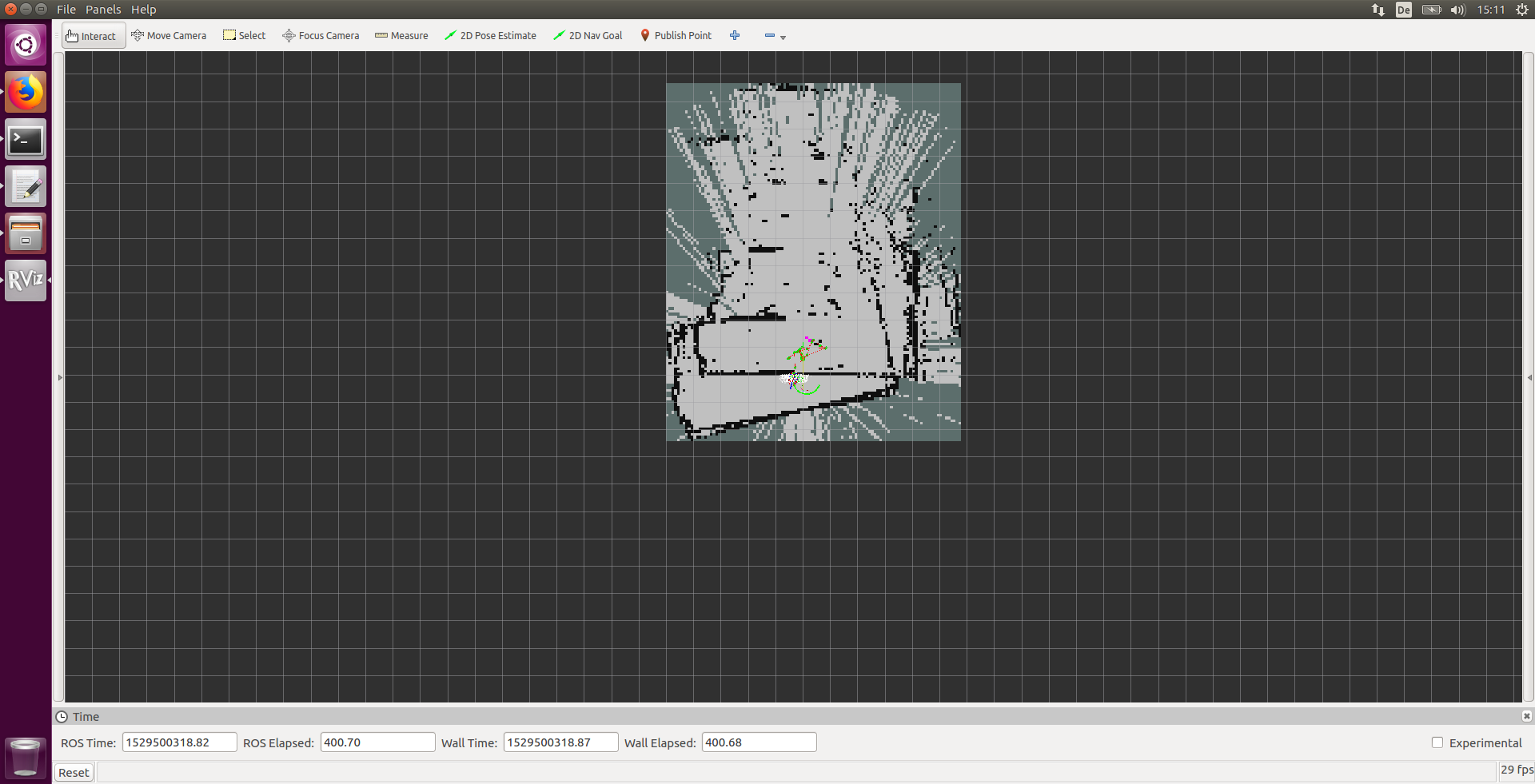
But the map that is built has a weird behavior: First, the map looks normal with the first borders seen, but after i move the robot a little bit (with teleop) the map is somehow rebuild with new coords. As seen in the picture, the lower border in the south of the pic is relocated and turned (its displayed twice).
Any ideas for this problem?
I also cant make a proper StartExploring call and i think its associated with this mapping failure.
Heres the launch file:
<launch> <!-- Some general parameters --> <rosparam file="$(find nav2d_tutorials)/param/ros.yaml"/> <param name="/laser_frame" value="base_footprint" /> <!-- Start the Operator to control the simulated robot --> <node name="Operator" pkg="nav2d_operator" type="operator" > <remap from="/cmd_vel" to="/mobile_base/commands/velocity" /> <rosparam file="$(find nav2d_tutorials)/param/operator.yaml"/> <rosparam file="$(find nav2d_tutorials)/param/costmap.yaml" ns="local_map" /></node> <!-- Start Mapper to genreate map from laser scans --> <node name="Mapper" pkg="nav2d_karto" type="mapper"> <rosparam file="$(find nav2d_tutorials)/param/mapper.yaml"/></node> <!-- Start the Navigator to move the robot autonomously --> <node name="Navigator" pkg="nav2d_navigator" type="navigator"> <rosparam file="$(find nav2d_tutorials)/param/navigator.yaml"/></node> <node name="GetMap" pkg="nav2d_navigator" type="get_map_client" /> <node name="Explore" pkg="nav2d_navigator" type="explore_client" /> <node name="SetGoal" pkg="nav2d_navigator" type="set_goal_client" /> <!-- Start the joystick-driver and remote-controller for operation--> <node name="Joystick" pkg="joy" type="joy_node" /> <node name="Remote" pkg="nav2d_remote" type="remote_joy" /> <!-- RVIZ to view the visualization --> <node name="RVIZ" pkg="rviz" type="rviz" args=" -d $(find nav2d_tutorials)/param/tutorial3.rviz" /> </launch>
add a comment

