
How to locate origin of world frame in Rviz ?
Hi,
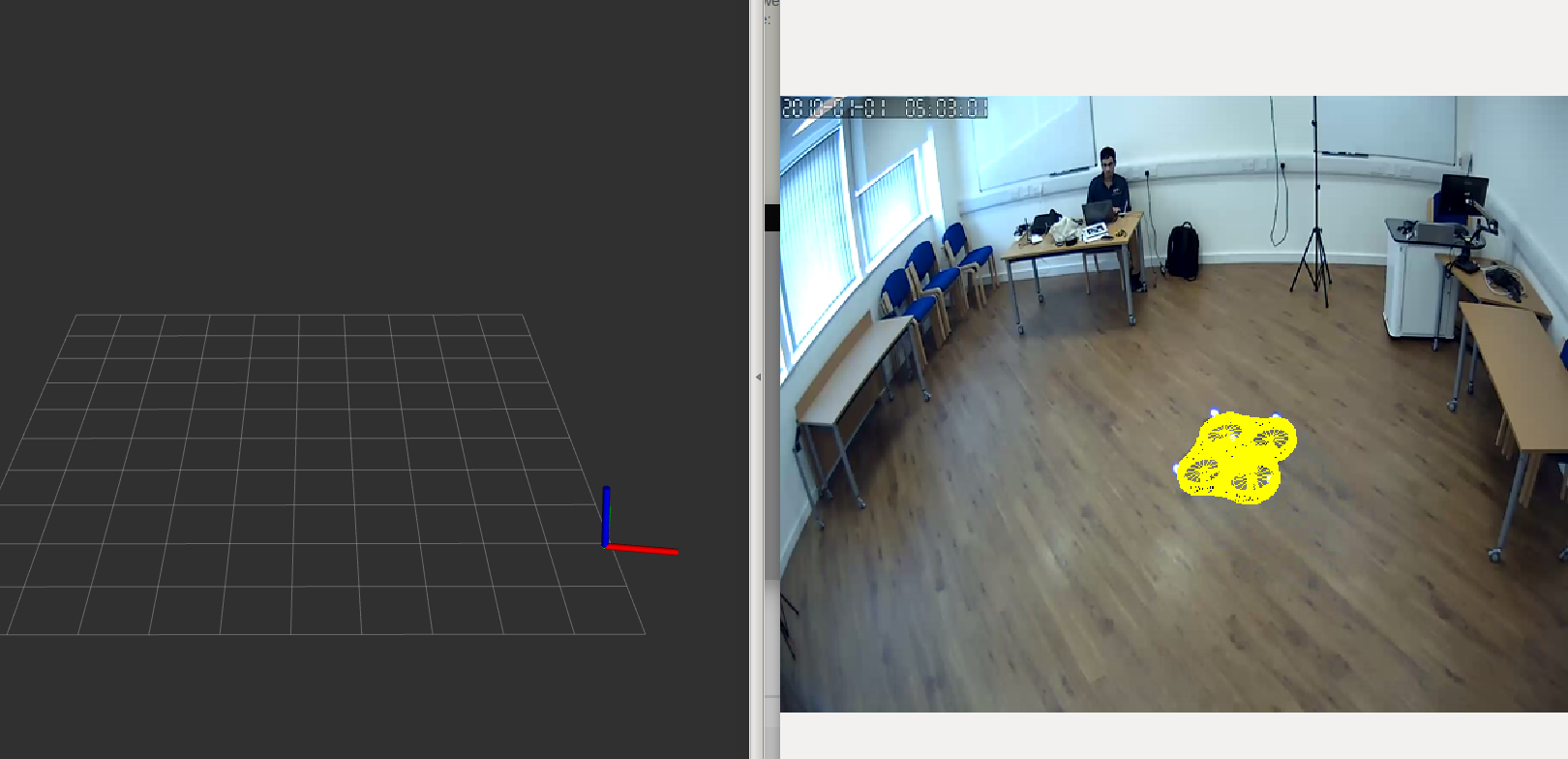
I am currently trying to visualize the world pose of my robot by publishing a poseStamped message to Rviz. I can see the axes fine but I want to know where the origin of the world frame in Rviz is.
Below is an image of the issue, the world frame is on the corner to the right wall of where the person is sitting, clearly the view in which Rviz opens up is not the origin. Hence, How can I find Rviz's origin ?
Thanks !
add a comment
