
no texture in gazebo with sw_urdf_exporter

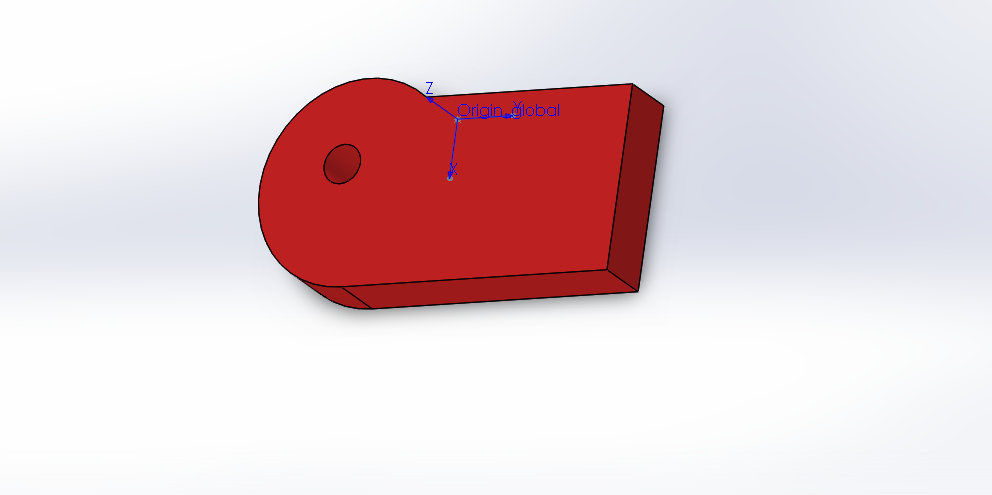 above is test model in solidwork 2017. the urdf is:
above is test model in solidwork 2017. the urdf is:
<robot
name="Part1">
<link
name="Part1">
<inertial>
<origin
xyz="0.01494 0.0058461 0.005"
rpy="0 0 0" />
<mass
value="0.019735" />
<inertia
ixx="6.70660759226523E-06"
ixy="2.43391976571625E-07"
ixz="-4.43715000683748E-23"
iyy="1.82003927243728E-06"
iyz="2.68535879956309E-22"
izz="8.19773544892975E-06" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="1.5707963267949 0 0" />
<geometry>
<mesh
filename="package://Part1/meshes/Part1.STL" />
</geometry>
<material
name="">
<color
rgba="1 0.16863 0.16863 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="1.5707963267949 0 0" />
<geometry>
<mesh
filename="package://Part1/meshes/Part1.STL" />
</geometry>
</collision>
</link>
</robot>
when I launch this urdf in gazebo/rviz can't see texture its plain white.
add a comment

