
Help with procedure for simple pick and place task using MoveIt!
Greetings. In order to move forward with a pick-and-place task using kinetic, I'd like your help to understand the procedure I should employ. Describing the project is my first aim and then I ask for your input.
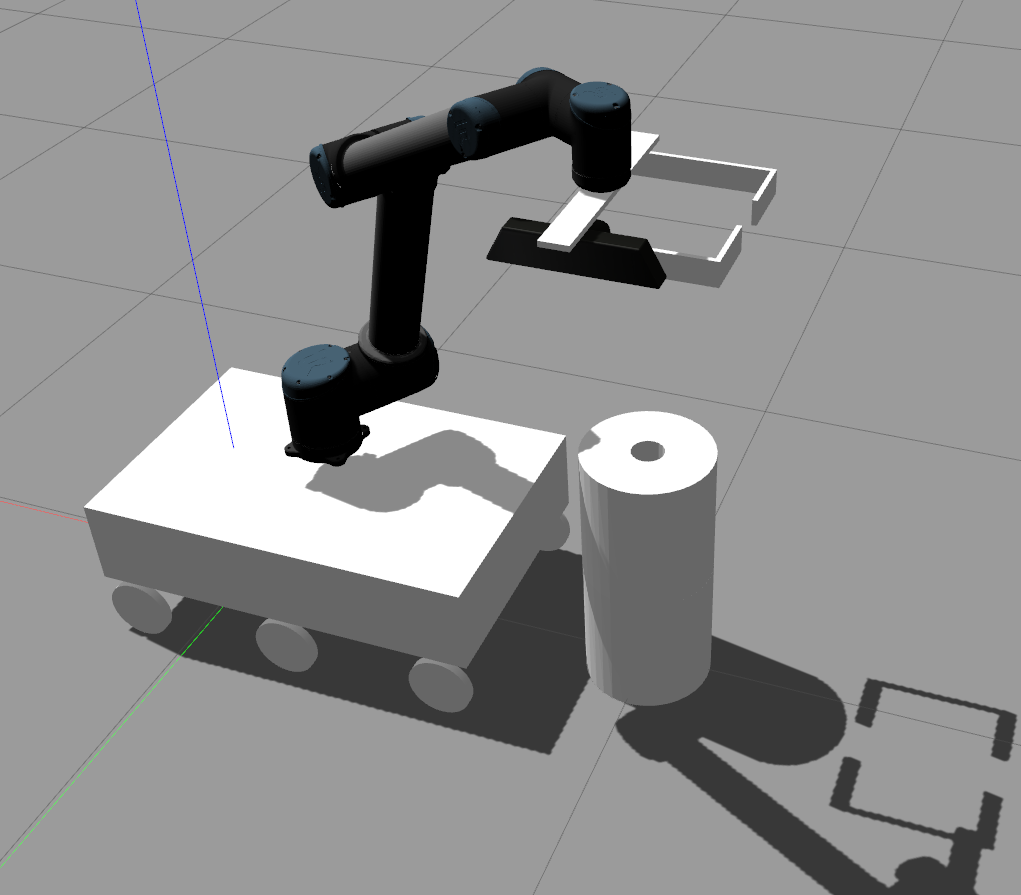
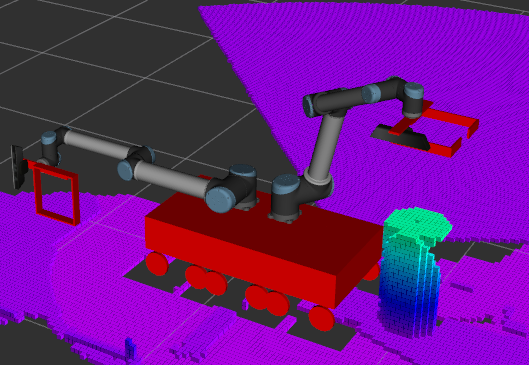
The manipulator is a UR 10 mounted on an AMR. For the Gazebo simulation, the end-of-arm has a Kinect model and a primitive, 1-DOF gripper. Our task is to pick up a cylindrical (tubular?) object and hang it on a peg. The current step I'd like to accomplish is to grab a tube by placing the gripper above it (pictured in the two images), open the gripper, move along the cylinder axis until the gripper is at the midpoint of the object, and then close the gripper.
The motion along the cylinder axis does not complete; it stops at the point when the gripper would collide with the Octomap voxels as shown in this image.
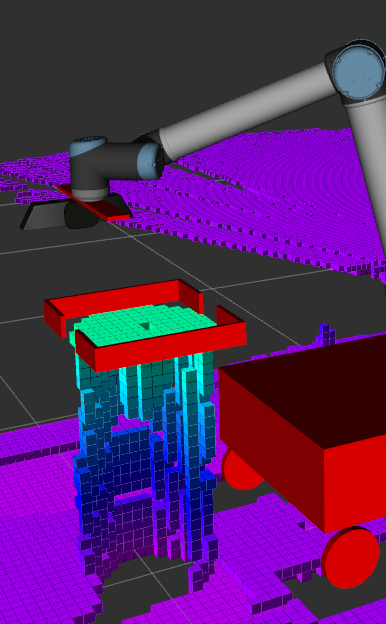
It seems the pick and place pipeline (that's me using jargon I'm uncertain about) is unnecessarily complicated for this task; both the gripper and grasped object are very simple. Note that the cylinder in the screenshots is really a stack of two objects; that is, the object is only half as long as it looks in these pictures.
I'm using Python and thus moveit_commander. My guess for how to proceed is to call add_box (or add_mesh), get the gripper in position and close it, then call attach_box and I'm good to go? Is there a step I'm missing for having MoveIt! ignore collisions between the gripper and the object?
A seemingly unimportant question is what's up with the original state of my robot not being erased from RVIZ as shown in that middle picture?

