
MoveIt! failling to execute trajectory in real robot
Hi guys,
I am on ROS Kinetic and Ubuntu 16.04 LTS. I am trying to use MoveIt! to execute a trajectory (between 2 random points, for example) on a manipulator using a node that sends this trajectory. I have previously used this same code to execute the trajectory in Gazebo so I know that the code works.
I can plan and execute in the MoveIt! GUI in RViz with no problems, the arm moves perfectly to the desired point and orientation. Now I want to be able to code trajectories, so that's my struggle right now. First, whenever I launched the node with the code, I would get this message:
[ WARN] [1524843705.443787714]: Waiting for robotis_manipulator_h/main_group_controller/follow_joint_trajectory to come up
[ INFO] [1524843708.822639288]: Failed to call service get_planning_scene, have you launched move_group? at /home/josebrito/catkin_ws/src/moveit-kinetic-devel/moveit_ros/planning/planning_scene_monitor/src/planning_scene_monitor.cpp:485
[ INFO] [1524843709.024521785]: Constructing new MoveGroup connection for group 'main_group' in namespace ''
[ WARN] [1524843711.444321642]: Waiting for robotis_manipulator_h/main_group_controller/follow_joint_trajectory to come up
[ERROR] [1524843717.444503875]: Action client not connected: robotis_manipulator_h/main_group_controller/follow_joint_trajectory
[ INFO] [1524843717.550721955]: Returned 0 controllers in list
[ INFO] [1524843717.592185366]: Trajectory execution is managing controllers
So I started an action server using this node in my launch file:
<node pkg="industrial_robot_client" type="joint_trajectory_action" name="joint_trajectory_action_node">
And now, whenever I run the node, I get all of these errors:
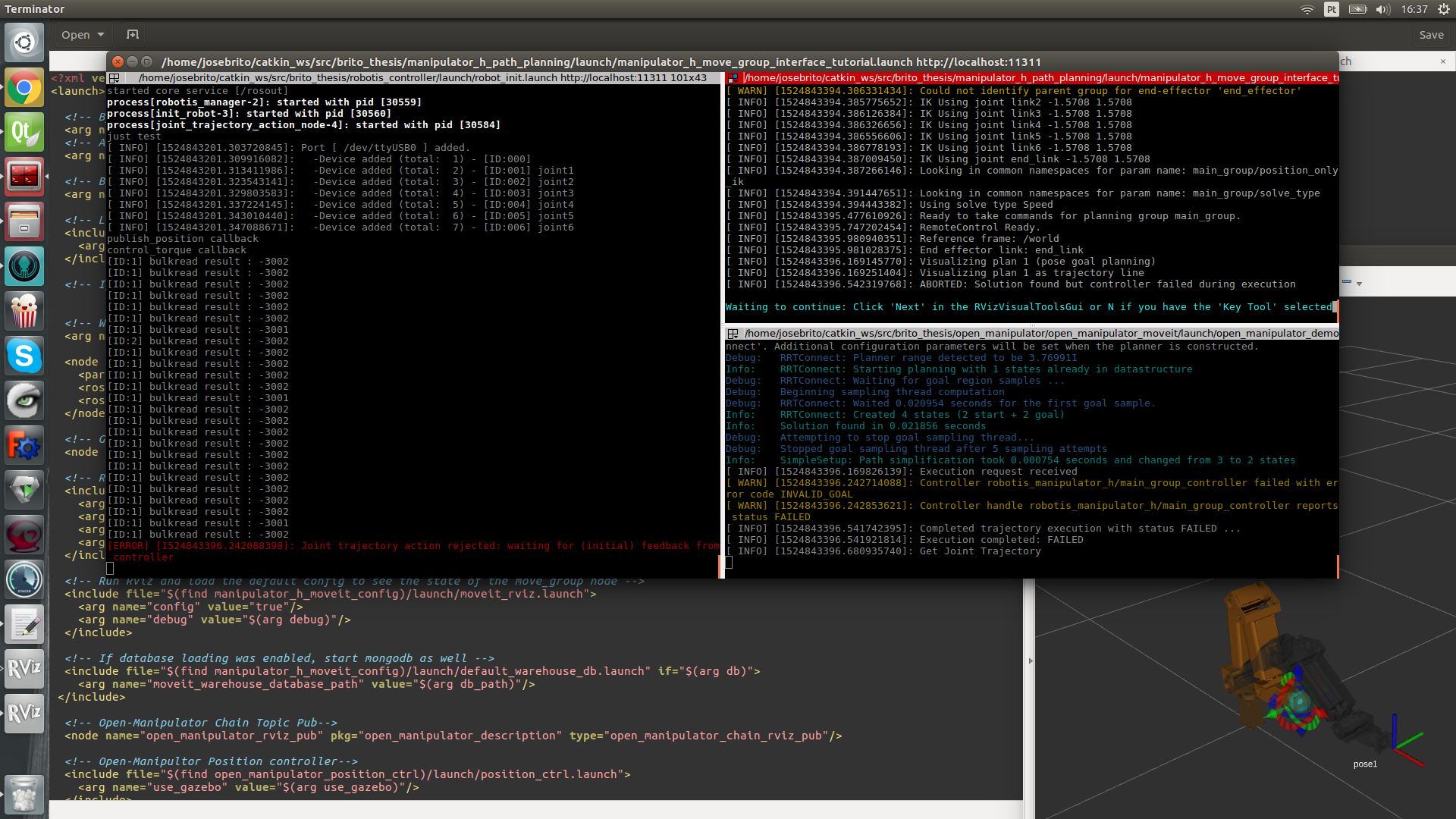
Do you guys have any ideas on why are they appearing?
Best regards, José Brito

