
Starting step ROS2
From the last few weeks, I have been studying and implementing examples based on ROS and now i have finally jimped into ROS2. Honestly, the more i read, the more i get confused. I guess i am missing the starting point. For the moment i have thought of a simple application which is as follows :
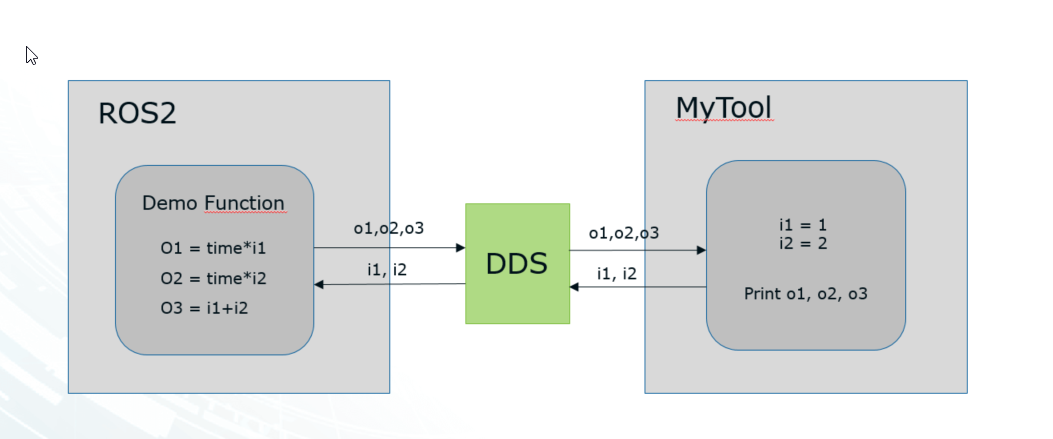
AIM : To test communication between ROS2 and an Individual tool through DDS.
- Create a New Package in ROS2.
- Write a simple function
o1 = i1*time. - Connect the DDS layer(ROS2) with a tool and display this updated value of a in the tool.
- The inputs to the tool is a python script file which can take a server address and a port number to establish a connection.
- Note and try to syncronize the time stamps between the ROS2 function and the tool.
I am just looking for a starting point for this as I feel a bit lost around. Any help would be appreciated.
EDIT: modified the function and attached an image


You will have to explain what you mean by "connect the DDS layer with a tool". What is this tool? Do you want to use DDS directly from the tool? Why can't the tool use the ROS client library?
@Geoff : edited the question and attached an image for better understanding. The tool is a co simulation tool where different simulation tools can be integrated. I want DDS as a communication medium between the tool and ROS2 (requirement).
Can this be closed in favor of https://answers.ros.org/question/2897...
@William : I would say no as this question goes more in the direction "Connecting a Tool interface with ROS2" only the function part is common.