
robot arm is broken link by link in gazebo
Hi all,
I have succeeded loading my designed robot arm in rviz and finished planning and executing. Right now I want to use load kinect to get some simulated data for robot arm. Hence I am trying to load urdf file in gazebo. The problem is my robot arm is broken link by link. It seems joint element in urdf doesn't work. I followed the tutorial of urdf in gazebo and added friction and damping in the urdf. I am not sure where I got wrong. Thanks in advance for any suggestions.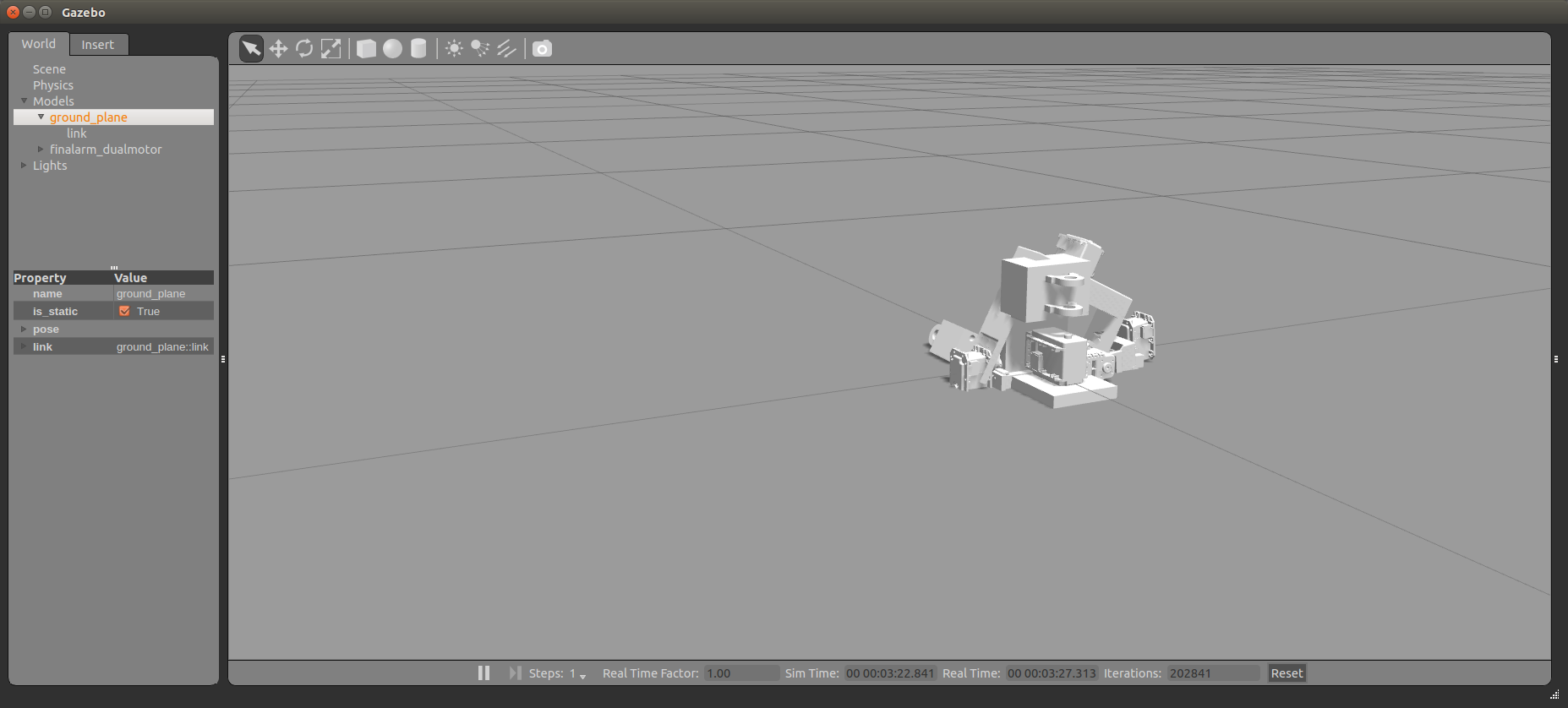
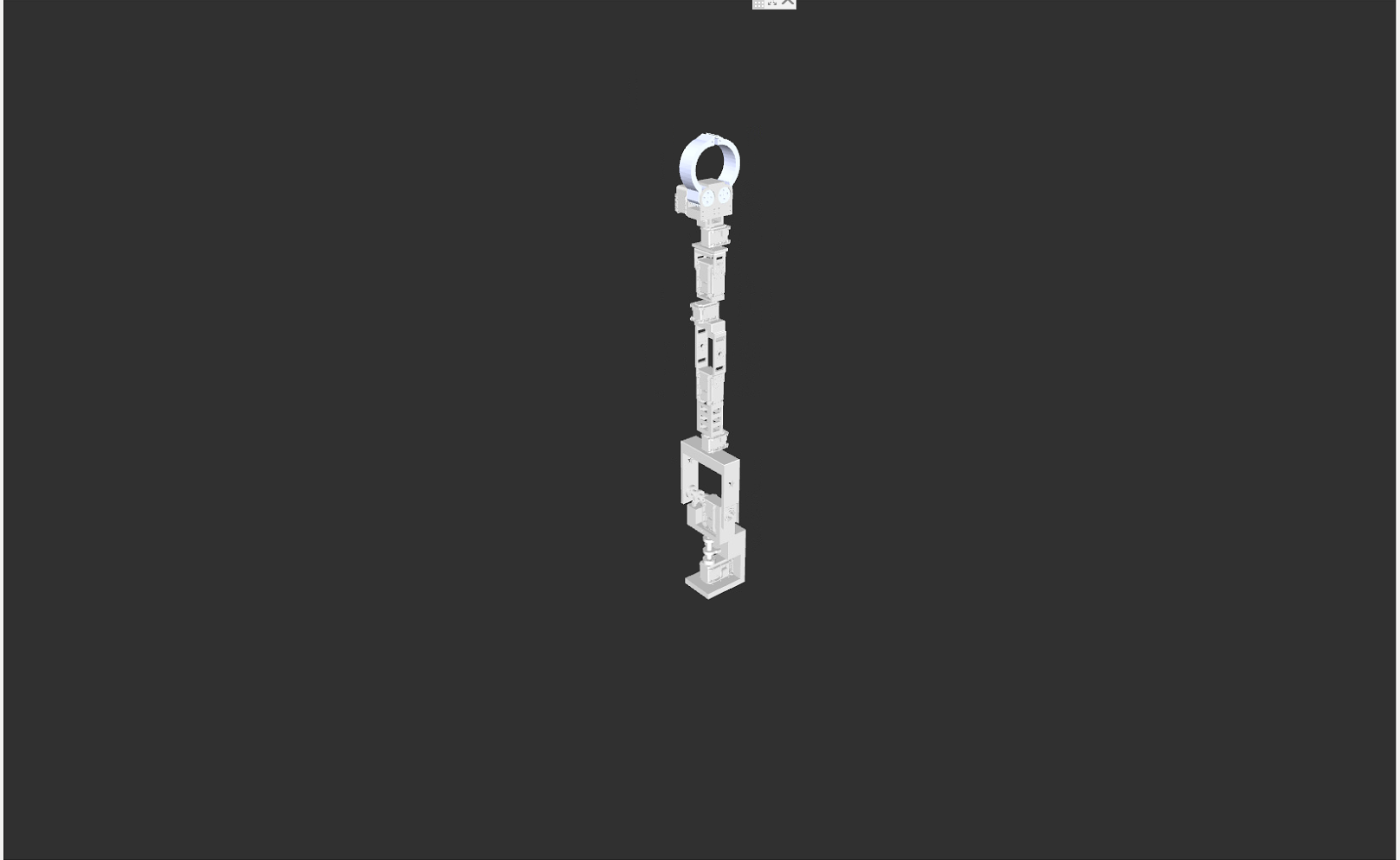
Here is the pic that robot arm in the rviz
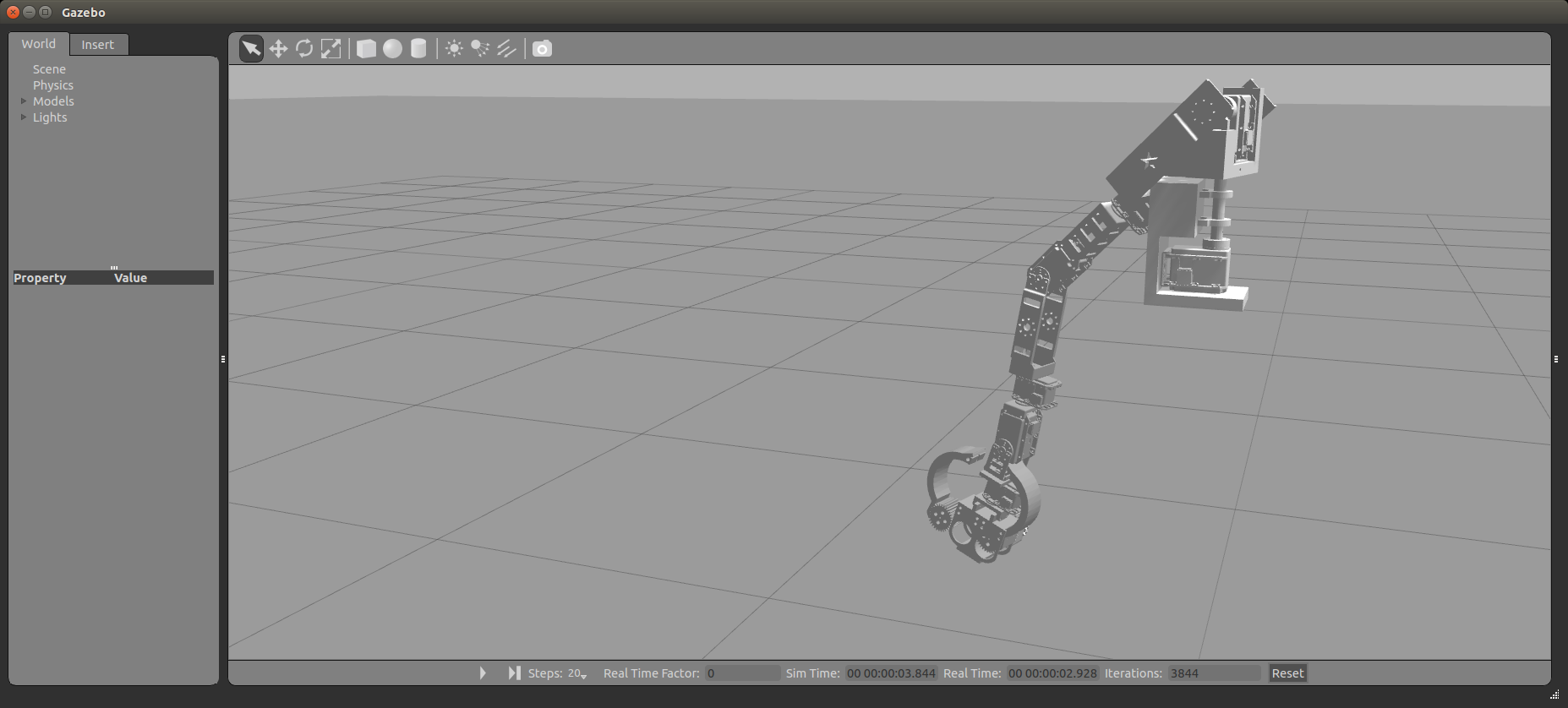
Here is the view that joint in gazebo:
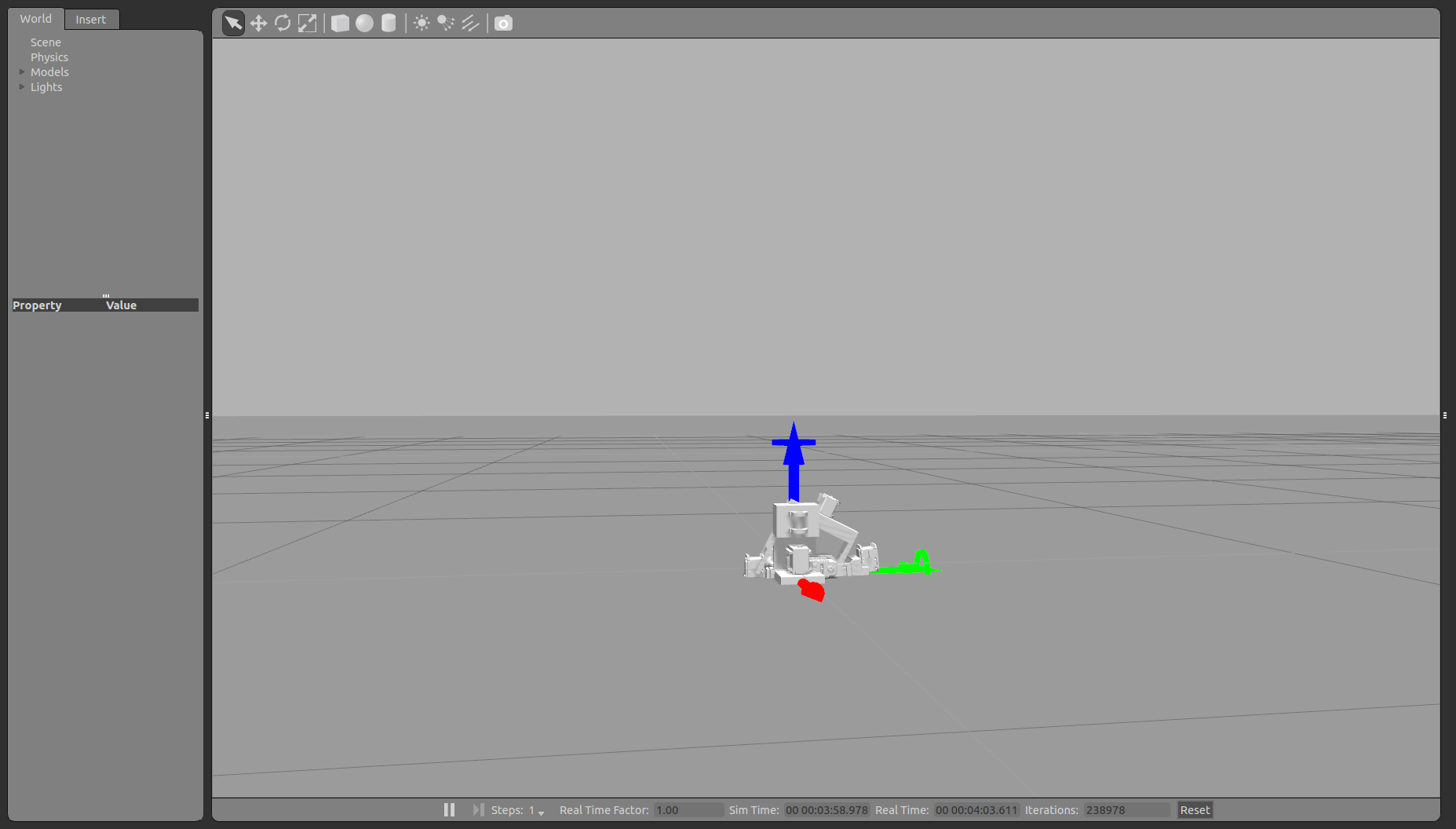
Here is the pic of using simulation pause:
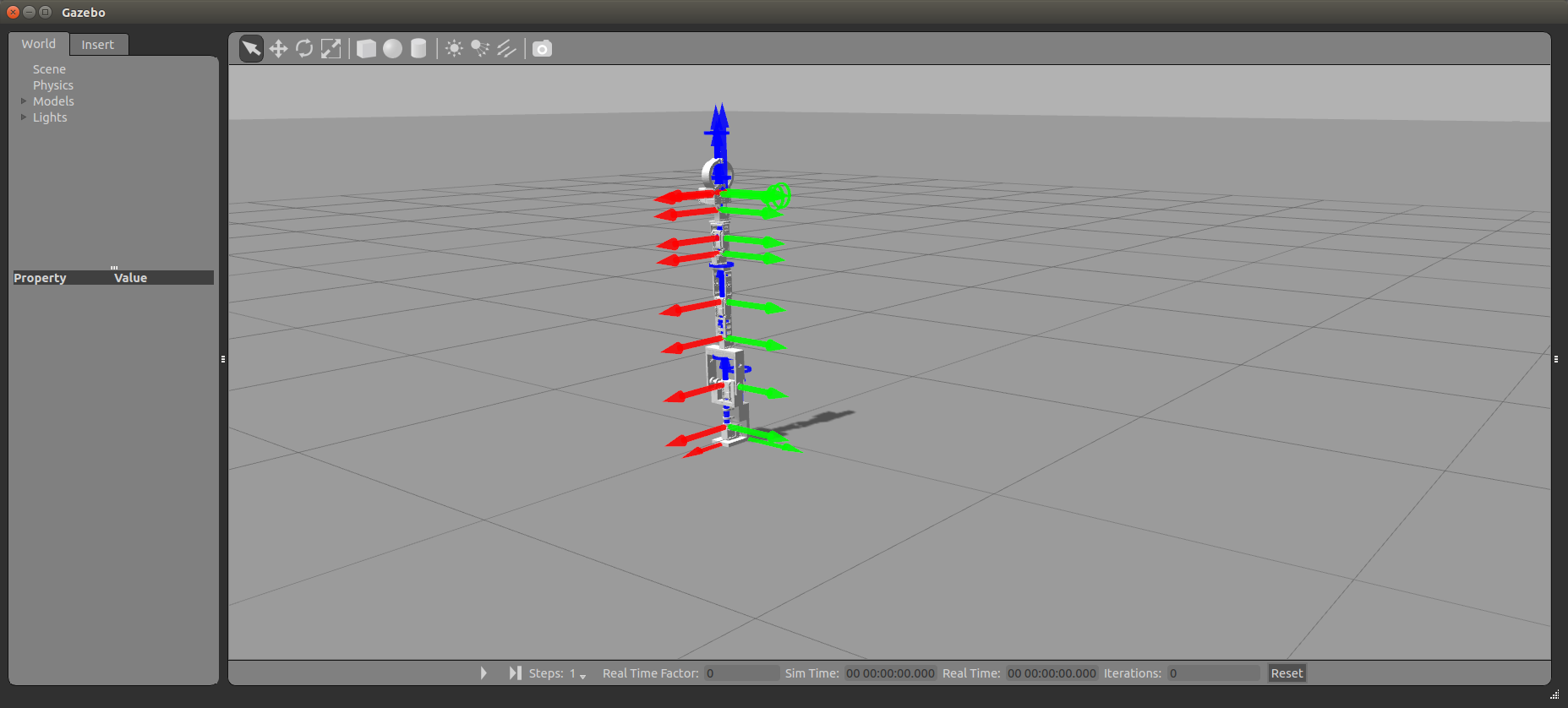
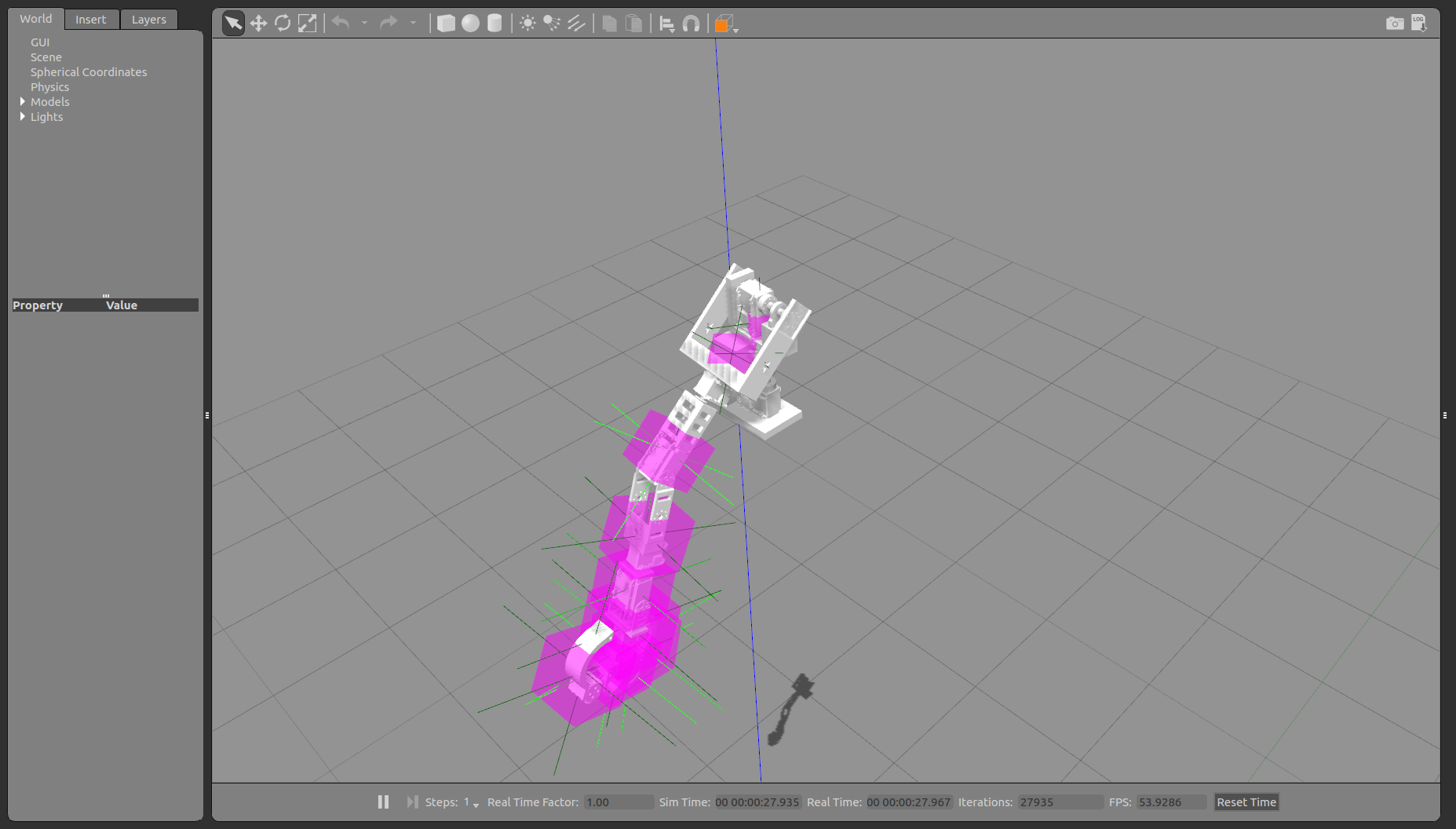
The pic of fixing exploding problem:
Here is the sample of urdf for the robot arm:
<link
name="base_link">
<inertial>
<origin
xyz="0.0321026763828113 2.50206915787532E-06 0.0657435992941309"
rpy="0 0 0" />
<mass
value="1.10920648420033" />
<inertia
ixx="0.00147297997205269"
ixy="5.79000298722719E-08"
ixz="0.000465603614160418"
iyy="0.00175551330106354"
iyz="8.33670869119005E-08"
izz="0.000282540363613262" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://finalarm_dualmotor/meshes/base_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.752941176470588 0.752941176470588 0.752941176470588 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://finalarm_dualmotor/meshes/base_link.STL" />
</geometry>
</collision>
</link>
<link
name="link_2">
<inertial>
<origin
xyz="-0.109631651147839 0.00554931888805481 -0.00279543211641581"
rpy="0 0 0" />
<mass
value="0.471538287399184" />
<inertia
ixx="0.000342180694725082"
ixy="0.000123860746353015"
ixz="-6.21619859185448E-05"
iyy="0.000321444130264041"
iyz="0.000137295563003535"
izz="0.000525597338936957" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://finalarm_dualmotor/meshes/link_2.STL" />
</geometry>
<material
name="">
<color
rgba="0.752941176470588 0.752941176470588 0.752941176470588 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://finalarm_dualmotor/meshes/link_2.STL" />
</geometry>
</collision>
</link>
<joint
name="joint_1"
type="revolute">
<origin
xyz="0.0672 0 0.058"
rpy="0.46565 1.5708 0" />
<parent
link="base_link" />
<child
link="link_2" />
<axis
xyz="-1 0 0" />
<limit
lower="-3.14"
upper="3.14"
effort="6"
velocity="2.0" />
<dynamics damping="0.7"/>
</joint>


Can you post a sample of the urdf here? Something that shows a few links and joints.
@Airuno2L I have added a sample which contains link1, link2 and joint1 in the problem. I wanted to attach the whole urdf file but it doesn't allow me to do it. Please tell me if you need anything. Thank you for your help.
Could you also update your post to include a picture of your robot in RViz, so we can see what it's supposed to look like? Also, in Gazebo could you try viewing joints (View -> Joints).
@josephcoombe I already post the pic of arm in rviz and the view of joint_1 in gazebo but I am not sure whether the view of joint is the one you want. Please let me know if you know further infomation. Thanks.
@Oh233 By viewing joints, I mean in Gazebo go to top-left menu. Select 'View' menu. From drop-down list, check Joints. Gazebo will display RGB coordinate axes at each non-fixed joint in your model.